
● online
- Temperature and Humidity Transmitter Modbus SHT20
- Kabel Jumper 20cm Dupont 20 cm Female to Female Pe
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang
- Sensor Api Flame detector sensor
- Arduino Mega 2560 R3 - ATMEGA2560 Clone - CH340
- Kapton Tape Polymide Film 50mm Polimida 50 mm Isol
- LDR Sensor 5mm Cahaya 5528 Light Dependent Resisto
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to F
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Menangani Motor Stepper dan ULN2003 pada Arduino
Pada artikel ini akan membahas bagaimana cara menangani motor stepper dan uln2003 tentunya masih menggunakan Arduino sebagai kontrolernya. Stepper motor sendiri merupakan jenis motor dc yang prinsip kerjanya dikendalikan dengan pulsa-pulsa digital. Untuk bisa kita gunakan, diperlukan sebuah drive yaitu menggunakan ULN2003.
Untuk spesifikasinya di bawah ini :| Rated voltage | 5 V |
| Coil Resistance | 50 Ohms |
| Coil Type | Unipolar |
| Diameter – shaft | 0.197″ (5.00 mm) |
| Length – shaft and bearing | 0.394″ (10 mm) |
| Features | Flatted shaft |
| Size/dimension | Round – 1.100″ dia (28.00 mm) |
| Mounting hole spacing | Flatted Shaft |
| Gear reduction | 1/64 |
| Step angle | Half step mode (recommended): 0.0879° Full step mode: 0.176° |
| Steps per revolution | Half step mode: 4096 Full step mode: 2048 |
| Termination style | Wire leads with connector |
| Motor type | Permanent Magnet Gear Motor |
Alat dan Bahan
- Arduino Uno R3, BELI
- Paket ULN2003 dan Motor Stepper, BELI
- Kabel jumper male to female, BELI
- Library download, DISINI
Rangkaian

- Pin 8 Arduino ke IN1
- pin 9 Arduino ke IN2
- Pin 10 Arduino ke IN3
- Pin 11 Arduino ke IN4
- GND ke GND
- 5V ke 5V
Sketch program
#include <AccelStepper.h>
#define motorPin1 8 // IN1 on the ULN2003 driver
#define motorPin2 9 // IN2 on the ULN2003 driver
#define motorPin3 10 // IN3 on the ULN2003 driver
#define motorPin4 11 // IN4 on the ULN2003 driver
#define MotorInterfaceType 8
AccelStepper stepper = AccelStepper(MotorInterfaceType, motorPin1, motorPin3, motorPin2, motorPin4);
void setup() {
// Set the maximum steps per second:
stepper.setMaxSpeed(1000);
}
void loop() {
// Set the speed of the motor in steps per second:
stepper.setSpeed(500);
// Step the motor with constant speed as set by setSpeed():
stepper.runSpeed();
}
Sebelum upload program di atas, masukkan dulu library yang sudah didownload di atas. Untuk uploadnya seperti biasa, pilih board dan port yang digunakan.
Jika sudah amati pergerakan motor steppernya. Cukup sekian pembahasan kali ini semoga bermanfaat.Menangani Motor Stepper dan ULN2003 pada Arduino

Jumpa lagi dengan indomaker, salam hangat untuk anda-anda diluar sana yang selalu semangat belajar Arduino. Pada tutorial kali ini... selengkapnya
Potensiometer merupakan sebuah resistor yang nilainya dapat kita atur sesuai keinginan. Bagaimana cara mengaturnya? nah potensiometer memiliki 3... selengkapnya
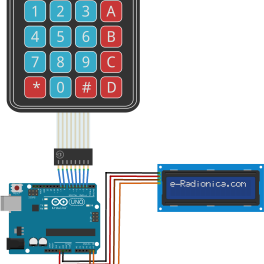
Keypad 4×4 berfungsi sebagai penghubung antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah Human Machine Interface (HMI). Papan... selengkapnya
Tutorial kali ini akan membahas mengenai penggunaan sensor IR (infrared) untuk mengontrol AC / pendingin udara menggunakan jaringan... selengkapnya

LCD atau Liquid Crystal Display adalah Perangkat yang berfungsi sebagai media penampil dengan memanfaatkan kristal cair sebagai objek penampil utama.... selengkapnya
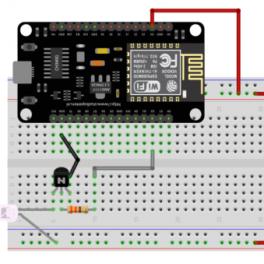
Hallo ketemu lagi dengan pembahasan sensor DHT11, kali ini kita akan menggunakannya pada NodemMCU. Nanti akan dibahas mengenai rangkaian... selengkapnya
Rain sensor merupakan sensor yang berfungsi untuk mendeteksi hujan turun atau tidak. Intinya sensor ini jika terkena air pada... selengkapnya

Sensor suara merupakan sensor yang dapat mengubah besaran suara menjadi besaran listrik dimana nilai diperoleh dari besarnya gelombang suara... selengkapnya
Bagi orang-orang yang sering melihat konten-konten di aplikasi Instagram mungkin sudah tidak asing lagi, melihat gambar atau foto yang... selengkapnya

Oke sekarang kita akan belajar menyalakan LED dengan Blynk NodeMCU. Tentunya anda semua sudah menginstal aplikasi Blynk kan ya…... selengkapnya

Deskripsi Produk “LED Dot Matrix Display dengan 32×8 pixel, berwarna Merah, menggunakan IC MAX7219 sebagai driver dan dapat dikoneksikan ke… selengkapnya
Rp 47.500
Dual Volt Amp Meter Digital Ampere Meter Voltmeter 10A 0-100V Ammeter Dilengkapi dengan pengukuran Voltmeter dan Amperemeter dalam 1 display… selengkapnya
Rp 26.500
ASIS adalah perangkat Smart Soket listrik produk dari Indomaker.com. Nama ‘ASIS’ merupakan kependekan dari ‘Andika Smart IoT Socket’. Secara umum,… selengkapnya
Rp 120.000
Clone of the highest version of the Arduino platform with the ATmega2560 processor. It fully works with Arduino IDE. A… selengkapnya
Rp 292.000
Paket B: + 1 pcs ESP32 D1 Mini + 4 pcs 10p Male Header + 4 pcs 10p Female Header… selengkapnya
Rp 91.000
Modul sensor tegangan AC bolak balik 1 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 21.000
Features and Specs: Dual-Core, 32-bit ARM Cortex M0+ Processor Clocked at 48MHz (default), configurable max to 133MHz. Ready with USB… selengkapnya
Rp 82.900
Kabel Jumper Dupont Pelangi 10 cm.. male to female 1 lembar isi 40 kabel
Rp 9.000
this is another great IIC/I2C/TWI/SPI Serial Interface. As the pin resources of for Arduino controller is limited, your project may… selengkapnya
Rp 12.400
Tang Crimping Press Skun Ratchet YTH SN-48B Model YTH SN-48B FOR NON INSULATED TERMINAL YTH SN-48B dengan mata Press 0.5… selengkapnya
Rp 150.000
Saat ini belum tersedia komentar.