
● online
- 10X RESISTOR 1K 1KOHM 1/4W 1% METAL FILM....
- Water Level sensor ketinggian air - deteksi air....
- RC Servo ARM Horn M3 Metal 25T MG995 MG946R MG996R....
- Kabel Jumper Dupont Pelangi 30 cm female to Female....
- TANG CRIMPING PRESS SKUN RATCHET YTH SN-48B....
- USB To RS485 High Speed Converter RS-485 RS 485 Ad....
- PWM DC 10A Motor 12V-40V Pulse Width Modulation Sp....
- Sensor Ultrasonik HC-SR04 HC SR04 Sensor Jarak Ult....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Membuat Running Text Menggunakan MAX7219 LED Matrix 32×8 Arduino
Siapa yang nggak kenal dengan running text? Running text merupakan sebuah teks berjalan pada sebuah papan yang berisi led-led yang disusun secara sistematis. Kegunaannya yaitu untuk untuk kebutuhan informasi seperti perkantoran, toko-toko, market dan sebagainya. Bukan teks berjalan saja bisa juga digunakan untuk yang lain seperti JWS, timer, papan skor, antrian dan masih banyak lagi.
Untuk kali ini kita akan belajar cara membuatnya menggunakan MAX7219 LED matrix 32×8 dan Arduino. Berikut ini beberapa komponen yang dibutuhkan :
- Arduino Uno R3, BELI
- MAX7219 LED matrix 32×8, BELI
- Kabel jumper, BELI
- Library MD_MAX72xx, download
- Library MD_Parola, download
Rangkaian

Keterangan :
- VCC dihubungkan ke 5V Arduino
- GND dihubungkan ke GND
- DIN dihubungkan ke pin 11
- CS dihubungkan ke pin 10
- CLK dihubungkan ke pin 13
Rangkai sesuai gambar dan keterangan gambar di atas. Selanjutnya silahkan masukkan library yang sudah di download.
Sketch Program
#include <MD_Parola.h>
#include <MD_MAX72xx.h>
#include <SPI.h>
// set to 1 if we are implementing the user interface pot, switch, etc
#define USE_UI_CONTROL 0
#if USE_UI_CONTROL
#include <MD_UISwitch.h>
#endif
// Turn on debug statements to the serial output
#define DEBUG 0
#if DEBUG
#define PRINT(s, x) { Serial.print(F(s)); Serial.print(x); }
#define PRINTS(x) Serial.print(F(x))
#define PRINTX(x) Serial.println(x, HEX)
#else
#define PRINT(s, x)
#define PRINTS(x)
#define PRINTX(x)
#endif
#define HARDWARE_TYPE MD_MAX72XX::FC16_HW
#define MAX_DEVICES 4
#define CLK_PIN 13
#define DATA_PIN 11
#define CS_PIN 10
// HARDWARE SPI
MD_Parola P = MD_Parola(HARDWARE_TYPE, CS_PIN, MAX_DEVICES);
// SOFTWARE SPI
//MD_Parola P = MD_Parola(HARDWARE_TYPE, DATA_PIN, CLK_PIN, CS_PIN, MAX_DEVICES);
// Scrolling parameters
#if USE_UI_CONTROL
const uint8_t SPEED_IN = A5;
const uint8_t DIRECTION_SET = 8; // change the effect
const uint8_t INVERT_SET = 9; // change the invert
const uint8_t SPEED_DEADBAND = 5;
#endif // USE_UI_CONTROL
uint8_t scrollSpeed = 40
; // default frame delay value
textEffect_t scrollEffect = PA_SCROLL_LEFT;
textPosition_t scrollAlign = PA_LEFT;
uint16_t scrollPause = 200; // in milliseconds
// Global message buffers shared by Serial and Scrolling functions
#define BUF_SIZE 75
char curMessage[BUF_SIZE] = { "" };
char newMessage[BUF_SIZE] = { "WELCOME TO INDOMAKER.COM" };
bool newMessageAvailable = true;
#if USE_UI_CONTROL
MD_UISwitch_Digital uiDirection(DIRECTION_SET);
MD_UISwitch_Digital uiInvert(INVERT_SET);
void doUI(void)
{
// set the speed if it has changed
{
int16_t speed = map(analogRead(SPEED_IN), 0, 1023, 10, 150);
if ((speed >= ((int16_t)P.getSpeed() + SPEED_DEADBAND)) ||
(speed <= ((int16_t)P.getSpeed() - SPEED_DEADBAND)))
{
P.setSpeed(speed);
scrollSpeed = speed;
PRINT("\nChanged speed to ", P.getSpeed());
}
}
if (uiDirection.read() == MD_UISwitch::KEY_PRESS) // SCROLL DIRECTION
{
PRINTS("\nChanging scroll direction");
scrollEffect = (scrollEffect == PA_SCROLL_LEFT ? PA_SCROLL_RIGHT : PA_SCROLL_LEFT);
P.setTextEffect(scrollEffect, scrollEffect);
P.displayClear();
P.displayReset();
}
if (uiInvert.read() == MD_UISwitch::KEY_PRESS) // INVERT MODE
{
PRINTS("\nChanging invert mode");
P.setInvert(!P.getInvert());
}
}
#endif // USE_UI_CONTROL
void readSerial(void)
{
static char *cp = newMessage;
while (Serial.available())
{
*cp = (char)Serial.read();
if ((*cp == '\n') || (cp - newMessage >= BUF_SIZE - 2)) // end of message character or full buffer
{
*cp = '\0'; // end the string
// restart the index for next filling spree and flag we have a message waiting
cp = newMessage;
newMessageAvailable = true;
}
else // move char pointer to next position
cp++;
}
}
void setup()
{
Serial.begin(57600);
Serial.print("\n[Parola Scrolling Display]\nType a message for the scrolling display\nEnd message line with a newline");
#if USE_UI_CONTROL
uiDirection.begin();
uiInvert.begin();
pinMode(SPEED_IN, INPUT);
doUI();
#endif // USE_UI_CONTROL
P.begin();
P.displayText(curMessage, scrollAlign, scrollSpeed, scrollPause, scrollEffect, scrollEffect);
}
void loop()
{
#if USE_UI_CONTROL
doUI();
#endif // USE_UI_CONTROL
if (P.displayAnimate())
{
if (newMessageAvailable)
{
strcpy(curMessage, newMessage);
newMessageAvailable = false;
}
P.displayReset();
}
readSerial();
}
Upload sketch program di atas. Untuk merubah teksnya silahkan ubah pada kode di bawah ini.

Cukup sekian pembahasan kali ini, semoga berhasil.
Membuat Running Text Menggunakan MAX7219 LED Matrix 32×8 Arduino
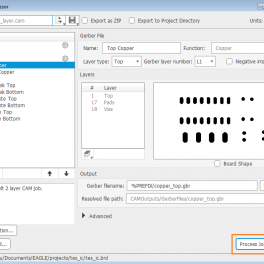
Pada penggunaan mesin CNC router salah satu kegunaanya adalah dapat membuat layout atau jalur PCB. Cara penggunaanya kita memerlukan... selengkapnya
Sudah pernah menyalakan LED menggunakan Python? Atau membaca input dari tombol? Di proyek kali ini, kamu akan menggabungkan dua fungsi... selengkapnya
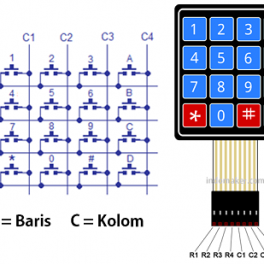
Keypad 4×4 merupakan sebuah komponen berisi tombol-tombol dan disusun secara matrix yang berfungsi sebagai inputan kedalam suatu sistem tertentu.... selengkapnya
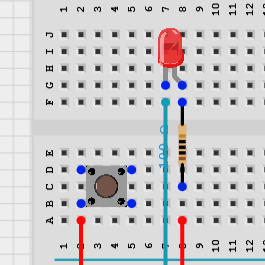
Kalau kamu baru mulai belajar Arduino, percobaan pertama yang paling wajib dicoba adalah menyalakan LED. Percobaan ini kelihatannya simpel, tapi... selengkapnya

MPU6050 adalah Sensor Gyroscope dan Accelerometer yang memiliki 6-axis Motion Tracking di mana perangkat ini mengkombinasikan 3-axis gyroscope, 3-axis accelerometer... selengkapnya
LoRa merupakan singkatan dari Long Range, dimana module ini menggunakan frekuensi radio dengan jarak yang jauh dan konsumsi daya... selengkapnya
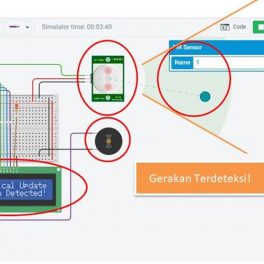
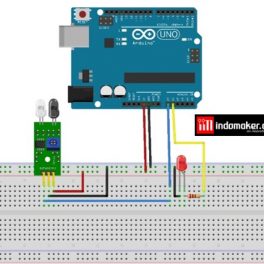
Halo semuanya, pada kesempatan kali ini saya ingin berbagi tutorial tentang simulasi penggunaan sensor PIR (Passive Infra Red) untuk... selengkapnya

Pasti Anda semua sudah tahukan apa itu pas foto. Bagi Anda yang belum tahu apa itu pas foto, pas... selengkapnya
Sensor Inframerah atau infrared (IR) adalah sensor yang dapat mendeteksi hambatan menggunakan cahaya inframerah yang dipantulkan. Sensor ini memiliki... selengkapnya
Dalam menjalankan bisnis online tentu saja harus memperhatikan beberapa aspek agar bisnis kita berjalan dengan lancar. Sebagai contoh di... selengkapnya


Spesifikasi: 50mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 75.000
Case patern: Solid Warna : Merah dan Hijau Current: 10-20 mA Diameter: 3mm
Rp 300
TECHNICAL SPECIFICATIONS: – Broadcom BCM2711, Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz – 2GB LPDDR4-2400 SDRAM – 2.4… selengkapnya
Rp 940.000
Spesifikasi: 20mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 219.000
The power supply is isolated industrial power modules, with a temperature protection, overcurrent and short circuit full protection, high and… selengkapnya
Rp 15.900
Kabel Jumper Dupont Pelangi 10 cm male to male 1 lembar = 40 kabel
Rp 13.000
Kabel jumper Dupont untuk jumper Arduino atau Raspberry Pi 20 cm Male to Male 1 lembar = 40 kabel
Rp 11.300
Menerima jasa cetak PCB FR2 (pertinax) / FR4 (double) single / double layer. Silahkan ke web kalkulator biaya cetak pcb… selengkapnya
Rp 1.000
Mini Solderless Breadboard 400 Tie Points adalah breadboard 400 titik lubang, dengan ukuran yang compact sangat cocok untuk anda yang… selengkapnya
Rp 7.800
Saat ini belum tersedia komentar.