
● online
- LCD CHARACTER 16X2 1602 5V GREEN HIJAU BACKLIGHT M
- Relay Module 1 Channel Modul Relay 5V 10A 1 Channe
- Modul Sensor Tegangan AC Bolak balik 220V Listrik
- E18-D80NK Infrared Obstacle Avoidance Sensor Proxi
- TANG CRIMPING PRESS SKUN RATCHET YTH SN-48B
- Sensor Api Flame detector sensor
- RC Servo ARM Horn M3 Metal 25T MG995 MG946R MG996R
- Modul Sensor Tegangan AC Bolak balik 220V Listrik
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Menangani 8×8 LED Dot Matrix Arduino
8×8 LED dot matrix merupakan sebuah display yang terdiri dari kumpulan led yang disusun secara simetris sejumlah 8 baris dan 8 kolom. Display nya bisa menampilkan berbagai karakter seperti huruf, angka maupun gambar. Untuk kegunaannya sering dipakai sebagai papan informasi berupa running text atau pun yang lainnya. Di bawah ini merupakan konfigurasi dari 8×8 dot matrix ini.

Sama seperti 7 segment dot matrix ini juga mempunyai jenis yaitu anoda dan katoda. Secara tampilan tidak ada bedanya, namun kita bisa mengenalinya dengan kode/seri yang terdapat di 8×8 dot matrix itu sendiri. Untuk katoda biasa ditandai dengan akhiran Ax, misalnya 2728AS. Sementara untuk anoda ditandai dengan akhiran Bx misalnya 3930BS. Cukup mudah kan? agar dapat digunakan sesuai keinginan, kita membutuhkan sebuah kontroler yang tak asing lagi adalah Arduino.
Alat dan bahan
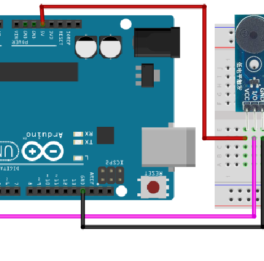
Rangkaian

Sketch Program
#define ROW_1 2
#define ROW_2 3
#define ROW_3 4
#define ROW_4 5
#define ROW_5 6
#define ROW_6 7
#define ROW_7 8
#define ROW_8 9
#define COL_1 10
#define COL_2 11
#define COL_3 12
#define COL_4 13
#define COL_5 A0
#define COL_6 A1
#define COL_7 A2
#define COL_8 A3
const byte rows[] = {
ROW_1, ROW_2, ROW_3, ROW_4, ROW_5, ROW_6, ROW_7, ROW_8
};
const byte col[] = {
COL_1,COL_2, COL_3, COL_4, COL_5, COL_6, COL_7, COL_8
};
// The display buffer
// It's prefilled with a smiling face (1 = ON, 0 = OFF)
byte ALL[] = {B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111};
byte EX[] = {B00000000,B00010000,B00010000,B00010000,B00010000,B00000000,B00010000,B00000000};
byte A[] = { B00000000,B00111100,B01100110,B01100110,B01111110,B01100110,B01100110,B01100110};
byte B[] = {B01111000,B01001000,B01001000,B01110000,B01001000,B01000100,B01000100,B01111100};
byte C[] = {B00000000,B00011110,B00100000,B01000000,B01000000,B01000000,B00100000,B00011110};
byte D[] = {B00000000,B00111000,B00100100,B00100010,B00100010,B00100100,B00111000,B00000000};
byte E[] = {B00000000,B00111100,B00100000,B00111000,B00100000,B00100000,B00111100,B00000000};
byte F[] = {B00000000,B00111100,B00100000,B00111000,B00100000,B00100000,B00100000,B00000000};
byte G[] = {B00000000,B00111110,B00100000,B00100000,B00101110,B00100010,B00111110,B00000000};
byte H[] = {B00000000,B00100100,B00100100,B00111100,B00100100,B00100100,B00100100,B00000000};
byte I[] = {B00000000,B00111000,B00010000,B00010000,B00010000,B00010000,B00111000,B00000000};
byte J[] = {B00000000,B00011100,B00001000,B00001000,B00001000,B00101000,B00111000,B00000000};
byte K[] = {B00000000,B00100100,B00101000,B00110000,B00101000,B00100100,B00100100,B00000000};
byte L[] = {B00000000,B00100000,B00100000,B00100000,B00100000,B00100000,B00111100,B00000000};
byte M[] = {B00000000,B00000000,B01000100,B10101010,B10010010,B10000010,B10000010,B00000000};
byte N[] = {B00000000,B00100010,B00110010,B00101010,B00100110,B00100010,B00000000,B00000000};
byte O[] = {B00000000,B00111100,B01000010,B01000010,B01000010,B01000010,B00111100,B00000000};
byte P[] = {B00000000,B00111000,B00100100,B00100100,B00111000,B00100000,B00100000,B00000000};
byte Q[] = {B00000000,B00111100,B01000010,B01000010,B01000010,B01000110,B00111110,B00000001};
byte R[] = {B00000000,B00111000,B00100100,B00100100,B00111000,B00100100,B00100100,B00000000};
byte S[] = {B00000000,B00111100,B00100000,B00111100,B00000100,B00000100,B00111100,B00000000};
byte T[] = {B00000000,B01111100,B00010000,B00010000,B00010000,B00010000,B00010000,B00000000};
byte U[] = {B00000000,B01000010,B01000010,B01000010,B01000010,B00100100,B00011000,B00000000};
byte V[] = {B00000000,B00100010,B00100010,B00100010,B00010100,B00010100,B00001000,B00000000};
byte W[] = {B00000000,B10000010,B10010010,B01010100,B01010100,B00101000,B00000000,B00000000};
byte X[] = {B00000000,B01000010,B00100100,B00011000,B00011000,B00100100,B01000010,B00000000};
byte Y[] = {B00000000,B01000100,B00101000,B00010000,B00010000,B00010000,B00010000,B00000000};
byte Z[] = {B00000000,B00111100,B00000100,B00001000,B00010000,B00100000,B00111100,B00000000};
float timeCount = 0;
void setup()
{
// Open serial port
Serial.begin(9600);
// Set all used pins to OUTPUT
// This is very important! If the pins are set to input
// the display will be very dim.
for (byte i = 2; i <= 13; i++)
pinMode(i, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
}
void loop() {
// This could be rewritten to not use a delay, which would make it appear brighter
delay(5);
timeCount += 1;
if(timeCount < 20)
{
drawScreen(A);
}
else if (timeCount < 40)
{
drawScreen(R);
}
else if (timeCount < 60)
{
drawScreen(D);
}
else if (timeCount < 80)
{
drawScreen(U);
}
else if (timeCount < 100)
{
drawScreen(I);
}
else if (timeCount < 120)
{
drawScreen(N);
}
else if (timeCount < 140) {
drawScreen(O);
}
else if (timeCount < 160)
{
drawScreen(ALL);
}
else if (timeCount < 180)
{
drawScreen(ALL);
}
else {
// back to the start
timeCount = 0;
}
}
void drawScreen(byte buffer2[])
{
// Turn on each row in series
for (byte i = 0; i < 8; i++) // count next row
{
digitalWrite(rows[i], HIGH); //initiate whole row
for (byte a = 0; a < 8; a++) // count next row
{
// if You set (~buffer2[i] >> a) then You will have positive
digitalWrite(col[a], (buffer2[i] >> a) & 0x01); // initiate whole column
delayMicroseconds(100); // uncoment deley for diferent speed of display
//delayMicroseconds(1000);
//delay(10);
//delay(100);
digitalWrite(col[a], 1); // reset whole column
}
digitalWrite(rows[i], LOW); // reset whole row
// otherwise last row will intersect with next row
}
}
//
/* this is siplest resemplation how for loop is working with each row.
digitalWrite(COL_1, (~b >> 0) & 0x01); // Get the 1st bit: 10000000
digitalWrite(COL_2, (~b >> 1) & 0x01); // Get the 2nd bit: 01000000
digitalWrite(COL_3, (~b >> 2) & 0x01); // Get the 3rd bit: 00100000
digitalWrite(COL_4, (~b >> 3) & 0x01); // Get the 4th bit: 00010000
digitalWrite(COL_5, (~b >> 4) & 0x01); // Get the 5th bit: 00001000
digitalWrite(COL_6, (~b >> 5) & 0x01); // Get the 6th bit: 00000100
digitalWrite(COL_7, (~b >> 6) & 0x01); // Get the 7th bit: 00000010
digitalWrite(COL_8, (~b >> 7) & 0x01); // Get the 8th bit: 00000001
}*/
Upload sketch program di atas, jika sudah yang nampil pada dot marix adalah icon love ;p. Semoga bermanfaat. terima kasih
Menangani 8×8 LED Dot Matrix Arduino
Mengapa disebut buzzer passive? karena sensor ini tidak mempunyai suara sendiri, melainkan buzzer ini perlu dikontrol dengan kontroler seperti... selengkapnya
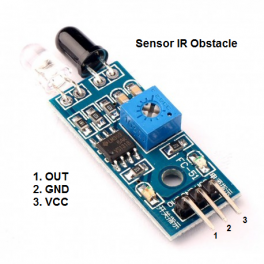
Sensor IR adalah sebuah sensor yang dapat mendeteksi rintangan menggunakan cahaya inframerah yang dipantulkan. Sensor ini mempunyai dua bagian... selengkapnya
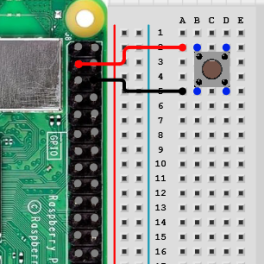
Tombol adalah salah satu komponen input paling sederhana namun sangat penting dalam berbagai proyek elektronika. Dalam tutorial ini, kamu akan... selengkapnya
Sensor PIR (Passive Infrared) berfungsi sebagai pendeteksi gerakan berbasis suhu tubuh, khususnya radiasi inframerah yang dipancarkan oleh manusia dan hewan... selengkapnya
Blynk menawarkan beragam fungsi ya, salah satunya untuk mengontrol perangkat. Penggunaan Blynk ini bisa kapan dan dimana saja ya,... selengkapnya

Rotary encoder adalah sebuah perangkat elektronik yang mampu mengkonversi gerakan mekanis berputar menjadi sinyal listrik, menjadi elemen kunci dalam memenuhi... selengkapnya

I2C merupakan sebuah modul komunikasi serial dua arah yang berfungsi untuk mengirim dan menerima data. Keduanya adalah SCL (Serial... selengkapnya
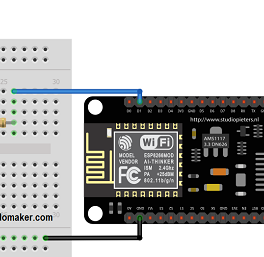
Bagi anda yang belum tau cara menggunakan LED pada NodeMCU, pada artikel ini akan di bahas cara-caranya. Sebelum melangkah... selengkapnya
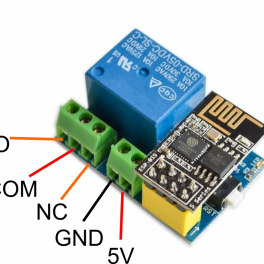
Tidak jauh-jauh dari shield ESP-01 lagi, kali ini akan membahas module shield untuk relay. Cukup praktis dan hemat size... selengkapnya

Sedikit kembali ke awal pembelajaran, pembahasan kali ini diperuntukan untuk anda yang masih bingung untuk belajar Arduino dari mana.... selengkapnya

MERK : TOWER PRO MG995 180 derajat Specifications Weight: 55 g Dimension: 40.7 x 19.7 x 42.9 mm approx. Stall… selengkapnya
Rp 36.300
Support terus UKM indonesia dengan membeli produk-produk dalam negeri. Untuk kualitas tidak usah diragukan, udah kita tes QC dengan sangat… selengkapnya
Rp 8.500
Dimmer AC 220 Volt 4000 Watt + Casing Aluminium Potensiometer untuk mengatur tegangan output min/max pada tegangan AC PLN 220V…. selengkapnya
Rp 52.500
Modul sensor tegangan AC bolak balik 1 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 21.000
Spesifikasi: 50mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 75.000
Bagaimana jika mikrokontroler yang anda gunakan tidak memiliki port ADC. atau anda masih kurang dengan spesifikasi resolusi ADC yang disediakan… selengkapnya
Rp 65.000
Tang Crimping Press Skun Ratchet YTH SN-48B Model YTH SN-48B FOR NON INSULATED TERMINAL YTH SN-48B dengan mata Press 0.5… selengkapnya
Rp 150.000
POTENSIOMETER LINEAR MONO 10K ohm
Rp 1.900

Modul sensor tegangan AC bolak balik 3 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 57.000
Saat ini belum tersedia komentar.