
● online
- Motor Servo MG995 TowerPro Metal Gear
- LDR Sensor 5mm Cahaya 5528 Light Dependent Resisto
- Tilt Sensor SW-520D Module Modul Sensor Kemiringan
- Raspberry Pi 4 Model B - 2GB RAM Raspberry Pi 4B
- Modul Sensor Tegangan AC Bolak balik 220V Listrik
- Push Button Tactile Switch Saklar Tombol Tinggi -
- Kapton Tape Polymide Film 50mm Polimida 50 mm Isol
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Menangani 8×8 LED Dot Matrix Arduino
8×8 LED dot matrix merupakan sebuah display yang terdiri dari kumpulan led yang disusun secara simetris sejumlah 8 baris dan 8 kolom. Display nya bisa menampilkan berbagai karakter seperti huruf, angka maupun gambar. Untuk kegunaannya sering dipakai sebagai papan informasi berupa running text atau pun yang lainnya. Di bawah ini merupakan konfigurasi dari 8×8 dot matrix ini.

Sama seperti 7 segment dot matrix ini juga mempunyai jenis yaitu anoda dan katoda. Secara tampilan tidak ada bedanya, namun kita bisa mengenalinya dengan kode/seri yang terdapat di 8×8 dot matrix itu sendiri. Untuk katoda biasa ditandai dengan akhiran Ax, misalnya 2728AS. Sementara untuk anoda ditandai dengan akhiran Bx misalnya 3930BS. Cukup mudah kan? agar dapat digunakan sesuai keinginan, kita membutuhkan sebuah kontroler yang tak asing lagi adalah Arduino.
Alat dan bahan
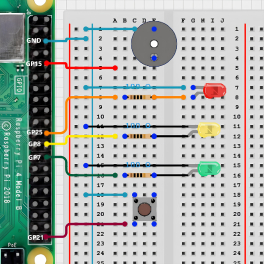
Rangkaian

Sketch Program
#define ROW_1 2
#define ROW_2 3
#define ROW_3 4
#define ROW_4 5
#define ROW_5 6
#define ROW_6 7
#define ROW_7 8
#define ROW_8 9
#define COL_1 10
#define COL_2 11
#define COL_3 12
#define COL_4 13
#define COL_5 A0
#define COL_6 A1
#define COL_7 A2
#define COL_8 A3
const byte rows[] = {
ROW_1, ROW_2, ROW_3, ROW_4, ROW_5, ROW_6, ROW_7, ROW_8
};
const byte col[] = {
COL_1,COL_2, COL_3, COL_4, COL_5, COL_6, COL_7, COL_8
};
// The display buffer
// It's prefilled with a smiling face (1 = ON, 0 = OFF)
byte ALL[] = {B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111};
byte EX[] = {B00000000,B00010000,B00010000,B00010000,B00010000,B00000000,B00010000,B00000000};
byte A[] = { B00000000,B00111100,B01100110,B01100110,B01111110,B01100110,B01100110,B01100110};
byte B[] = {B01111000,B01001000,B01001000,B01110000,B01001000,B01000100,B01000100,B01111100};
byte C[] = {B00000000,B00011110,B00100000,B01000000,B01000000,B01000000,B00100000,B00011110};
byte D[] = {B00000000,B00111000,B00100100,B00100010,B00100010,B00100100,B00111000,B00000000};
byte E[] = {B00000000,B00111100,B00100000,B00111000,B00100000,B00100000,B00111100,B00000000};
byte F[] = {B00000000,B00111100,B00100000,B00111000,B00100000,B00100000,B00100000,B00000000};
byte G[] = {B00000000,B00111110,B00100000,B00100000,B00101110,B00100010,B00111110,B00000000};
byte H[] = {B00000000,B00100100,B00100100,B00111100,B00100100,B00100100,B00100100,B00000000};
byte I[] = {B00000000,B00111000,B00010000,B00010000,B00010000,B00010000,B00111000,B00000000};
byte J[] = {B00000000,B00011100,B00001000,B00001000,B00001000,B00101000,B00111000,B00000000};
byte K[] = {B00000000,B00100100,B00101000,B00110000,B00101000,B00100100,B00100100,B00000000};
byte L[] = {B00000000,B00100000,B00100000,B00100000,B00100000,B00100000,B00111100,B00000000};
byte M[] = {B00000000,B00000000,B01000100,B10101010,B10010010,B10000010,B10000010,B00000000};
byte N[] = {B00000000,B00100010,B00110010,B00101010,B00100110,B00100010,B00000000,B00000000};
byte O[] = {B00000000,B00111100,B01000010,B01000010,B01000010,B01000010,B00111100,B00000000};
byte P[] = {B00000000,B00111000,B00100100,B00100100,B00111000,B00100000,B00100000,B00000000};
byte Q[] = {B00000000,B00111100,B01000010,B01000010,B01000010,B01000110,B00111110,B00000001};
byte R[] = {B00000000,B00111000,B00100100,B00100100,B00111000,B00100100,B00100100,B00000000};
byte S[] = {B00000000,B00111100,B00100000,B00111100,B00000100,B00000100,B00111100,B00000000};
byte T[] = {B00000000,B01111100,B00010000,B00010000,B00010000,B00010000,B00010000,B00000000};
byte U[] = {B00000000,B01000010,B01000010,B01000010,B01000010,B00100100,B00011000,B00000000};
byte V[] = {B00000000,B00100010,B00100010,B00100010,B00010100,B00010100,B00001000,B00000000};
byte W[] = {B00000000,B10000010,B10010010,B01010100,B01010100,B00101000,B00000000,B00000000};
byte X[] = {B00000000,B01000010,B00100100,B00011000,B00011000,B00100100,B01000010,B00000000};
byte Y[] = {B00000000,B01000100,B00101000,B00010000,B00010000,B00010000,B00010000,B00000000};
byte Z[] = {B00000000,B00111100,B00000100,B00001000,B00010000,B00100000,B00111100,B00000000};
float timeCount = 0;
void setup()
{
// Open serial port
Serial.begin(9600);
// Set all used pins to OUTPUT
// This is very important! If the pins are set to input
// the display will be very dim.
for (byte i = 2; i <= 13; i++)
pinMode(i, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
}
void loop() {
// This could be rewritten to not use a delay, which would make it appear brighter
delay(5);
timeCount += 1;
if(timeCount < 20)
{
drawScreen(A);
}
else if (timeCount < 40)
{
drawScreen(R);
}
else if (timeCount < 60)
{
drawScreen(D);
}
else if (timeCount < 80)
{
drawScreen(U);
}
else if (timeCount < 100)
{
drawScreen(I);
}
else if (timeCount < 120)
{
drawScreen(N);
}
else if (timeCount < 140) {
drawScreen(O);
}
else if (timeCount < 160)
{
drawScreen(ALL);
}
else if (timeCount < 180)
{
drawScreen(ALL);
}
else {
// back to the start
timeCount = 0;
}
}
void drawScreen(byte buffer2[])
{
// Turn on each row in series
for (byte i = 0; i < 8; i++) // count next row
{
digitalWrite(rows[i], HIGH); //initiate whole row
for (byte a = 0; a < 8; a++) // count next row
{
// if You set (~buffer2[i] >> a) then You will have positive
digitalWrite(col[a], (buffer2[i] >> a) & 0x01); // initiate whole column
delayMicroseconds(100); // uncoment deley for diferent speed of display
//delayMicroseconds(1000);
//delay(10);
//delay(100);
digitalWrite(col[a], 1); // reset whole column
}
digitalWrite(rows[i], LOW); // reset whole row
// otherwise last row will intersect with next row
}
}
//
/* this is siplest resemplation how for loop is working with each row.
digitalWrite(COL_1, (~b >> 0) & 0x01); // Get the 1st bit: 10000000
digitalWrite(COL_2, (~b >> 1) & 0x01); // Get the 2nd bit: 01000000
digitalWrite(COL_3, (~b >> 2) & 0x01); // Get the 3rd bit: 00100000
digitalWrite(COL_4, (~b >> 3) & 0x01); // Get the 4th bit: 00010000
digitalWrite(COL_5, (~b >> 4) & 0x01); // Get the 5th bit: 00001000
digitalWrite(COL_6, (~b >> 5) & 0x01); // Get the 6th bit: 00000100
digitalWrite(COL_7, (~b >> 6) & 0x01); // Get the 7th bit: 00000010
digitalWrite(COL_8, (~b >> 7) & 0x01); // Get the 8th bit: 00000001
}*/
Upload sketch program di atas, jika sudah yang nampil pada dot marix adalah icon love ;p. Semoga bermanfaat. terima kasih
Menangani 8×8 LED Dot Matrix Arduino
Hallo untuk selingan ya :p kali ini ini akan membahas khusus pemula yang ingin belajar Arduino yaitu membuat simulasi... selengkapnya

Arduino Pro Mini merupakan jenis Arduino yang berukuran kecil dibandingkan dengan Nano, Unodan Mega. Dengan ukuran yang kecil ini... selengkapnya
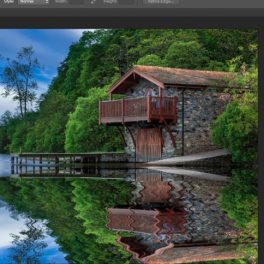
Pernahkah Anda melihat suatu objek foto diatas air, lalu di atas air ada pantulan dari objek foto tersebut, nah... selengkapnya
Blynk menawarkan beragam fungsi ya, salah satunya untuk mengontrol perangkat. Penggunaan Blynk ini bisa kapan dan dimana saja ya,... selengkapnya
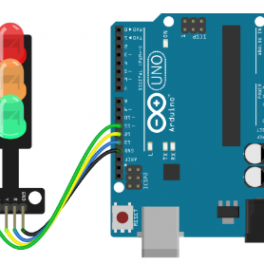
Raspberry Pi tidak hanya bisa menyalakan LED atau membaca input dari tombol, tapi juga bisa digunakan untuk membuat simulasi lampu... selengkapnya
Jumpa lagi bersama indomaker.com, setelah kemarin kita sudah bisa menampilkan sensor suhu dan kelembaban pada web browser DISINI. Sekarang kita... selengkapnya
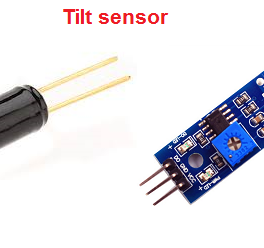
Oke Hallo semua pada kesempatan kali ini kita akan belajar mendeteksi kemiringan suatu benda. Sensor yang digunakan adalah tilt... selengkapnya

Pernahkah Anda mengambil foto pada saat hujan lebat, untuk menghasilkan gambar yang benar-benar realistis hujan, beberapa orang akan memperjuangkan... selengkapnya

Raspberry Pi adalah komputer mini yang sangat populer di kalangan penggemar elektronika dan pemrograman. Salah satu kelebihan utamanya adalah pin... selengkapnya
UI (User Interface) dan UX (User Experience) dalam sebuah pengembangan website dan aplikasi sangat penting dan saling berkaitan. Tetapi... selengkapnya

Kabel jumper Dupont untuk jumper Arduino atau Raspberry Pi 20 cm Male to Male 1 lembar = 40 kabel
Rp 11.300
Features: It is of high power density, high efficiency, high-reliability, small size and lightweight. It can isolate unsteady single-way voltage… selengkapnya
Rp 18.500
Compatibility: USB v2.0 standard Interface: Network: USB Series: RS-485 Port: an independent RS-485 Connector: Network: USB type A connector Series:… selengkapnya
Rp 38.800
The power supply is isolated industrial power modules, with a temperature protection, overcurrent and short circuit full protection, high and… selengkapnya
Rp 15.900
This is a set of transmitter and receiver in one of the photoelectric sensor. Detection distance can be adjusted according… selengkapnya
Rp 37.500
1 X LDR Sensor 5mm Cahaya 5528 Light Dependent Resistor LDR
Rp 4.000
Features – Calibrated directly in Celsius (Centigrade) – Linear + 10.0 mV/C scale factor – 0.5C accuracy guaranteeable (at +25C)… selengkapnya
Rp 8.000
Kabel jumper Dupont untuk jumper Arduino atau Raspeberry Pi 20 cm Female to female 1 lembar = 40 kabel
Rp 11.300
TECHNICAL SPECIFICATIONS: – Broadcom BCM2711, Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz – 2GB LPDDR4-2400 SDRAM – 2.4… selengkapnya
Rp 940.000
Spesifikasi: 50mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 75.000
Saat ini belum tersedia komentar.