
● online
- Kabel Jumper 20cm Dupont 20 cm Female to Female Pe....
- Kabel Jumper 10cm Dupont Pelangi 10 cm Male to Mal....
- ESR Meter Digital LCR-T4 Tester Transistor Diode M....
- LCD 16x2 / 1602 Display Biru + I2C Backpack Sudah ....
- Sensor Api Flame detector sensor....
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang....
- E18-D80NK Infrared Obstacle Avoidance Sensor Proxi....
- Motor Servo MG995 TowerPro Metal Gear....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Mengenal Lebih Lanjut Pin pada Sensor Line Tracker BFD-1000 dengan Raspberry Pi
Setelah mengetahui spesifikasi dan fungsi BFD-1000 pada artikel sebelumnya, maka kini mari kita belajar lebih dalam lagi mengenai pin pada BFD-1000. Di percobaan kali ini kita akan belajar untuk mengecek fungsi tiap sensor yang terdapat di modul.
Pada modul sensor line tracker BFD-1000 ada 5 sensor inframerah yang berfungsi untuk mendeteksi garis (hitam/putih), 1 sensor sentuh yang aktif ketika mendeteksi benturan, dan terakhir sensor jarak inframerah , meski sama-sama inframerah tapi sensor ini berfungsi sebagai mendeteksi penghalang atau benda di depan.

Gambar 1. Tata Letak Komponen Pendukung BFD-1000
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan:
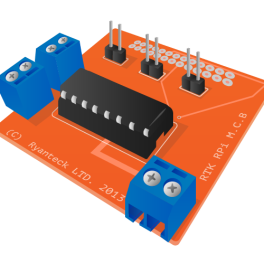
- Raspberry Pi Trainer Kit V2
- Sensor Line Tracking BFD-1000
- Kabel jumper
- Software:
- MobaXterm (untuk remote terminal)
- Notepad++ (untuk menulis skrip Python)
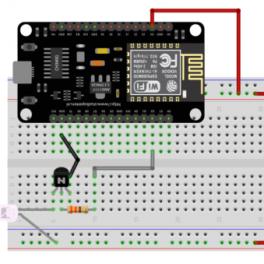
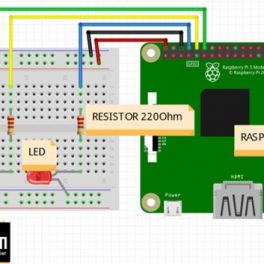
Wiring Rangkaian BFD-1000
Susun rangkaian dengan panduan seperti ini:
- Pin VCC ke 3v3
- Pin GND ke GND
- Pin S1 ke 18
- Pin S2 ke 16
- Pin S3 ke 19
- Pin S4 ke 20
- Pin S5 ke 21
- Pin CLP ke 26
- Pin Near ke 6

Gambar 2. Wiring Rangkaian BFD-1000 dengan Raspberry Pi
Menulis Program Mengecek Tiap Pin Sensor pada BFD-1000
Setelah semua komponen terpasang, buka Notepad++ dan buat file Python baru. Tulis kode berikut dan simpan file dengan nama bfd.py :
import RPi.GPIO as GPIO
import time
# --- SETUP PIN SENSOR ---
sensor_pins = {
"S1_kanan_luar": 18,
"S2_kanan_dalam": 16,
"S3_tengah": 19,
"S4_kiri_dalam": 20,
"S5_kiri_luar": 21,
"CLP": 26,
"NEAR": 6
}
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# Atur semua pin sensor sebagai input
for pin in sensor_pins.values():
GPIO.setup(pin, GPIO.IN)
# --- URUTAN TES SENSOR ---
sensor_urut = list(sensor_pins.items())
try:
print("Tes sensor satu per satu. Tekan Ctrl+C untuk berhenti.\n")
for nama, pin in sensor_urut:
print(f"--- Tes {nama.upper()} (GPIO {pin}) ---")
print("Letakkan objek (garis hitam / tangan / penghalang) di depan sensor.")
time.sleep(2)
for i in range(60): # <- Durasi diperpanjang: 60 × 0.3 detik ≈ 18 detik
status = GPIO.input(pin)
status_str = "Aktif (LOW / Hitam / Objek Dekat)" if status == GPIO.LOW else "Nonaktif (HIGH / Putih / Tidak Ada Objek)"
print(f"{nama.upper():<15}: {status_str}")
time.sleep(0.3)
print("-" * 40)
input("Tekan [ENTER] untuk lanjut ke sensor berikutnya...\n")
except KeyboardInterrupt:
print("\nTes dihentikan oleh user.")
finally:
GPIO.cleanup()
Penjelasan Kode
import RPi.GPIOdantime: Mengimpor library untuk mengakses GPIO Raspberry Pi dan fungsi waktu.sensor_pins = {...}: Menentukan pin GPIO yang digunakan oleh masing-masing sensor (S1–S5, CLP, dan NEAR).GPIO.setmode(GPIO.BCM): Mengatur Raspberry Pi untuk menggunakan penomoran pin BCM (bukan fisik).GPIO.setup(..., GPIO.IN): Mengatur semua pin sensor sebagai input digital agar dapat membaca sinyal dari sensor.sensor_urut = list(sensor_pins.items()): Mengubah dictionary sensor menjadi daftar berurutan untuk pengujian satu per satu.- Loop
fordigunakan untuk mengecek masing-masing sensor selama beberapa detik. GPIO.input(pin): Digunakan untuk membaca status sensor (LOW atau HIGH).- Status sensor ditampilkan dalam teks, menunjukkan apakah sensor aktif (mendeteksi garis hitam atau objek dekat) atau tidak.
input("Tekan ENTER..."): Program menunggu pengguna untuk lanjut ke sensor berikutnya setelah selesai menguji satu sensor.GPIO.cleanup(): Membersihkan semua konfigurasi GPIO setelah program dihentikan, agar tidak terjadi konflik di penggunaan berikutnya.
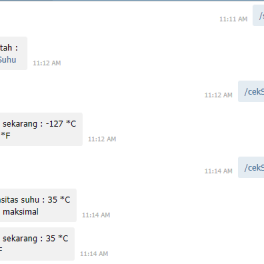
Apa yang Akan Terjadi?

Gambar 2. Hasil Percobaan Tes Sensor Line Tracker dengan Raspberry Pi
Saat program dijalankan, Raspberry Pi akan mengetes setiap sensor yang terhubung secara bergantian, mulai dari S1 hingga S5, serta sensor CLP dan NEAR. Untuk setiap sensor, diberi waktu sekitar 18 detik, jika sensor mendeteksi objek, akan muncul tulisan “Aktif (LOW / Hitam / Objek Dekat)”, dan jika tidak mendeteksi, akan muncul “Nonaktif (HIGH / Putih / Tidak Ada Objek)”. Setelah selesai membaca satu sensor, tekan ENTER untuk melanjutkan ke sensor berikutnya. Proses ini terus berlangsung sampai semua sensor diuji atau program dihentikan secara manual.
Mengenal Lebih Lanjut Pin pada Sensor Line Tracker BFD-1000 dengan Raspberry Pi

Thingspeak merupakan sebuah platform Internet of things yang memungkinkan anda untuk memonitoring/kontrol device menggunakan internet. Platform Iot ini gratis... selengkapnya
Motor merupakan salah satu komponen paling penting dalam dunia robotika karena memungkinkan sebuah sistem untuk bergerak secara fisik. Dengan motor,... selengkapnya

Apa itu efek autumn? Efek autumn adalah efek musim gugur, dimana dedaunan akan berubah warna dari hijau menjadi coklat... selengkapnya

Alat dan Bahan Sensor Inframerah MLX90614 Arduino nano beli Deskripsi Secara internal, MLX90614 terdiri dari dua perangkat yakni... selengkapnya
Tutorial kali ini akan membahas mengenai penggunaan sensor IR (infrared) untuk mengontrol AC / pendingin udara menggunakan jaringan... selengkapnya
Setelah kemarin sudah belajar Blynk dan sensor LDR DISINI, sekarang lanjut ke sensor berikutnya yaitu sensor DHT11 untuk memonitoring... selengkapnya
Dalam dunia fotografi, mengambil foto yang bagus merupakan suatu keahlian yang harus di kuasai oleh seorang fotografer. Karena dengan... selengkapnya
Melanjutakan tutorial edisi telegram kali ini kita akan mendetekesi suhu meggunakan sensor Ds18b20 dan ESP01. Dalam tutorial ini kita... selengkapnya
Traffic Light atau lampu lalu lintas adalah lampu yang mampu menertibkan arus lalu lintas jalanan baik kendaraan bermotor, mobil,... selengkapnya

Sensor ultrasonik merupakan sensor yang dapat mendeteksi suatu benda yang ada di depannya dengan jarak tertentu. Prinsip kerja dari... selengkapnya

Buruan dibeli gan….barang murah-berkualitas SIAPA CEPAT DIA DAPAT Spesifikasi: LCD 1602 / 16×2 (16 karakter, 2 baris) merek QAPASS (cek… selengkapnya
Rp 24.500ESR meter/LCR meter dengan layar lebar lebih jelas dan mantap dan dengan tempat batre jd lebih rapih batre lebih aman… selengkapnya
Rp 131.000 Rp 134.000
TECHNICAL SPECIFICATIONS: – Broadcom BCM2711, Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz – 2GB LPDDR4-2400 SDRAM – 2.4… selengkapnya
Rp 940.000
Modul sensor tegangan AC bolak balik 3 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 57.000
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750
Kabel jumper Dupont untuk jumper Arduino atau Raspberry Pi 20 cm Male to Male 1 lembar = 40 kabel
Rp 11.300
Specifications: 1. supports sampling costs (KHz): 8/11.025/12/16/22.05/24/32/44.1/48 2. 24-bit DAC output, dynamic range aid: 90dB, SNR aid: 85dB 3. fully… selengkapnya
Rp 17.800
Deskripsi Produk “LED Dot Matrix Display dengan 32×8 pixel, berwarna Merah, menggunakan IC MAX7219 sebagai driver dan dapat dikoneksikan ke… selengkapnya
Rp 47.500
Harga untuk 10pcs Resistance: 1K Ohm Wattage Rating: 0.25 Watt Tolerance: 1% Metal Film
Rp 1.500
Features: It is of high power density, high efficiency, high-reliability, small size and lightweight. It can isolate unsteady single-way voltage… selengkapnya
Rp 18.500
Saat ini belum tersedia komentar.