
● online
- Sensor Ultrasonik HC-SR04 HC SR04 Sensor Jarak Ult....
- RC Servo ARM Horn M3 Metal 25T MG995 MG946R MG996R....
- Jasa Cetak PCB....
- Resistor 220 Ohm 220R Ohm 220Ohm 1/4W 1% Metal fil....
- Dimmer SCR 2000W Motor Speed Controller 220V AC PW....
- LCD 16x2 / 1602 Display Arduino Raspberry LCD 16 x....
- Kabel Jumper 20cm Dupont 20 cm Female to Female Pe....
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Mengenal Lebih Lanjut Pin pada Sensor Line Tracker BFD-1000 dengan Raspberry Pi
Setelah mengetahui spesifikasi dan fungsi BFD-1000 pada artikel sebelumnya, maka kini mari kita belajar lebih dalam lagi mengenai pin pada BFD-1000. Di percobaan kali ini kita akan belajar untuk mengecek fungsi tiap sensor yang terdapat di modul.
Pada modul sensor line tracker BFD-1000 ada 5 sensor inframerah yang berfungsi untuk mendeteksi garis (hitam/putih), 1 sensor sentuh yang aktif ketika mendeteksi benturan, dan terakhir sensor jarak inframerah , meski sama-sama inframerah tapi sensor ini berfungsi sebagai mendeteksi penghalang atau benda di depan.

Gambar 1. Tata Letak Komponen Pendukung BFD-1000
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan:
- Raspberry Pi Trainer Kit V2
- Sensor Line Tracking BFD-1000
- Kabel jumper
- Software:
- MobaXterm (untuk remote terminal)
- Notepad++ (untuk menulis skrip Python)
Wiring Rangkaian BFD-1000
Susun rangkaian dengan panduan seperti ini:
- Pin VCC ke 3v3
- Pin GND ke GND
- Pin S1 ke 18
- Pin S2 ke 16
- Pin S3 ke 19
- Pin S4 ke 20
- Pin S5 ke 21
- Pin CLP ke 26
- Pin Near ke 6

Gambar 2. Wiring Rangkaian BFD-1000 dengan Raspberry Pi
Menulis Program Mengecek Tiap Pin Sensor pada BFD-1000
Setelah semua komponen terpasang, buka Notepad++ dan buat file Python baru. Tulis kode berikut dan simpan file dengan nama bfd.py :
import RPi.GPIO as GPIO
import time
# --- SETUP PIN SENSOR ---
sensor_pins = {
"S1_kanan_luar": 18,
"S2_kanan_dalam": 16,
"S3_tengah": 19,
"S4_kiri_dalam": 20,
"S5_kiri_luar": 21,
"CLP": 26,
"NEAR": 6
}
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# Atur semua pin sensor sebagai input
for pin in sensor_pins.values():
GPIO.setup(pin, GPIO.IN)
# --- URUTAN TES SENSOR ---
sensor_urut = list(sensor_pins.items())
try:
print("Tes sensor satu per satu. Tekan Ctrl+C untuk berhenti.\n")
for nama, pin in sensor_urut:
print(f"--- Tes {nama.upper()} (GPIO {pin}) ---")
print("Letakkan objek (garis hitam / tangan / penghalang) di depan sensor.")
time.sleep(2)
for i in range(60): # <- Durasi diperpanjang: 60 × 0.3 detik ≈ 18 detik
status = GPIO.input(pin)
status_str = "Aktif (LOW / Hitam / Objek Dekat)" if status == GPIO.LOW else "Nonaktif (HIGH / Putih / Tidak Ada Objek)"
print(f"{nama.upper():<15}: {status_str}")
time.sleep(0.3)
print("-" * 40)
input("Tekan [ENTER] untuk lanjut ke sensor berikutnya...\n")
except KeyboardInterrupt:
print("\nTes dihentikan oleh user.")
finally:
GPIO.cleanup()
Penjelasan Kode
import RPi.GPIOdantime: Mengimpor library untuk mengakses GPIO Raspberry Pi dan fungsi waktu.sensor_pins = {...}: Menentukan pin GPIO yang digunakan oleh masing-masing sensor (S1–S5, CLP, dan NEAR).GPIO.setmode(GPIO.BCM): Mengatur Raspberry Pi untuk menggunakan penomoran pin BCM (bukan fisik).GPIO.setup(..., GPIO.IN): Mengatur semua pin sensor sebagai input digital agar dapat membaca sinyal dari sensor.sensor_urut = list(sensor_pins.items()): Mengubah dictionary sensor menjadi daftar berurutan untuk pengujian satu per satu.- Loop
fordigunakan untuk mengecek masing-masing sensor selama beberapa detik. GPIO.input(pin): Digunakan untuk membaca status sensor (LOW atau HIGH).- Status sensor ditampilkan dalam teks, menunjukkan apakah sensor aktif (mendeteksi garis hitam atau objek dekat) atau tidak.
input("Tekan ENTER..."): Program menunggu pengguna untuk lanjut ke sensor berikutnya setelah selesai menguji satu sensor.GPIO.cleanup(): Membersihkan semua konfigurasi GPIO setelah program dihentikan, agar tidak terjadi konflik di penggunaan berikutnya.
Apa yang Akan Terjadi?

Gambar 2. Hasil Percobaan Tes Sensor Line Tracker dengan Raspberry Pi
Saat program dijalankan, Raspberry Pi akan mengetes setiap sensor yang terhubung secara bergantian, mulai dari S1 hingga S5, serta sensor CLP dan NEAR. Untuk setiap sensor, diberi waktu sekitar 18 detik, jika sensor mendeteksi objek, akan muncul tulisan “Aktif (LOW / Hitam / Objek Dekat)”, dan jika tidak mendeteksi, akan muncul “Nonaktif (HIGH / Putih / Tidak Ada Objek)”. Setelah selesai membaca satu sensor, tekan ENTER untuk melanjutkan ke sensor berikutnya. Proses ini terus berlangsung sampai semua sensor diuji atau program dihentikan secara manual.
Mengenal Lebih Lanjut Pin pada Sensor Line Tracker BFD-1000 dengan Raspberry Pi
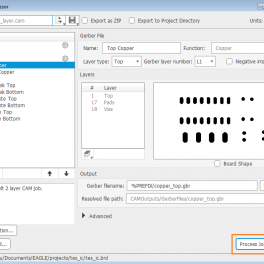
Pada penggunaan mesin CNC router salah satu kegunaanya adalah dapat membuat layout atau jalur PCB. Cara penggunaanya kita memerlukan... selengkapnya
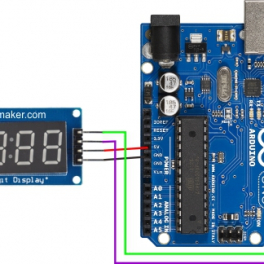
TM1637 merupakan sebuah komponen elektronika yang terdiri dari 4 digit 7 segment. Pada pembahasan sebelumnya kita sudah mempelajari apa itu... selengkapnya

Android merupakan sistem operasi untuk perangkat seluler dengan pengguna terbesar di dunia termasuk di Indonesia, dengan market share 90%... selengkapnya

Sebagai seorang programmer tentu saja harus mempunyai kemampuan di bidang Bahasa pemograman karena landasan utama dalam membangun sebuah aplikasi... selengkapnya

7 segment merupakan sebuah display yang berfungsi menampilkan sebuah karakter baik huruf maupun digit angka. Namun untuk huruf sangat... selengkapnya
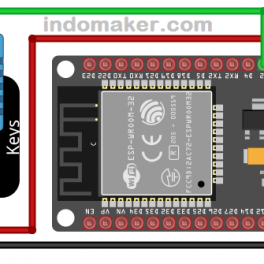
Kali ini kita akan mencoba menggunakan sensor DHT11 pada ESP32. Seperti yang kita ketahui sensor DHT11 ini berfungsi untuk... selengkapnya
RFID merupakan suatu teknologi yang dapat mengidentifikasi sebuah objek menggunakan frekuensi radio. Untuk dapat menggunakanya kita membutuhkan sebuah ID... selengkapnya
SW-420 adalah sensor untuk mendeteksi getaran, cara kerja sensor ini adalah dengan menggunakan 1 buah pelampung logam yang berisi 2... selengkapnya
Oke pada artikel kali ini membahas telegram kembali menggunakan sensor DHT untuk mendeteksi suhu dan kelembaban. Jadi nanti akan... selengkapnya

Sensor ultrasonik adalah salah satu sensor yang sering digunakan untuk mengukur jarak objek tanpa kontak langsung. Sensor ini bekerja dengan... selengkapnya

Bosan dengan modul arduino yang kalian punya, saatnya mencoba modul programmer yang lain yah ini dia RASPBERRY PI 4 COMPUTER… selengkapnya
Rp 1.199.000
Ini yang Seri SN – DS3231 I2C RTC Module khusus DS3231SN – Include Baterai – Module jam digital – Keperluan… selengkapnya
Rp 34.900
Support terus UKM indonesia dengan membeli produk-produk dalam negeri. Untuk kualitas tidak usah diragukan, udah kita tes QC dengan sangat… selengkapnya
Rp 8.500
Bosan dengan modul arduino yang kalian punya, saatnya mencoba modul programmer yang lain yah ini dia RASPBERRY PI 4 COMPUTER… selengkapnya
Rp 1.570.000
Kabel jumper Dupont untuk jumper Arduino atau Raspberry Pi 20 cm Male to Male 1 lembar = 40 kabel
Rp 11.300
2000W SCR Electronic Voltage Regulator Speed Controller Dimmer Thermostat Aplikasi : Kontrol temperature heater, kontrol kecepatan fan/bor tangan/gurinda tangan, kompor… selengkapnya
Rp 19.500

Features: Brand new and high quality. Control the speed of a DC motor with this controller. High efficiency, high torque,… selengkapnya
Rp 25.400
Dual Volt Amp Meter Digital Ampere Meter Voltmeter 10A 0-100V Ammeter Dilengkapi dengan pengukuran Voltmeter dan Amperemeter dalam 1 display… selengkapnya
Rp 26.500
Fitur: -Dapat mendeteksi api atau panjang gelombang sumber cahaya dalam 760nm ~ 1100nm – Api lebih ringan mendeteksi jarak 80cm… selengkapnya
Rp 9.000
Saat ini belum tersedia komentar.