
● online
- Raspberry Pi 4 Model B 4GB Original UK E14 Raspi 4....
- Max7219 Led Dot Matrix 32x8 Display Module For Ard....
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to F....
- Motor Servo MG995 TowerPro Metal Gear....
- Kabel Jumper arduino Dupont Pelangi 30 cm Male to ....
- B0505S-1W 5V to 5V converter DC DC power module co....
- Raspberry Pi 4 Model B 8GB Original UK E14 Raspi 4....
- USB To RS485 High Speed Converter RS-485 RS 485 Ad....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Mengambil Data Sudut dengan Sensor GY-50 L3G4200D berbasis Arduino Uno
Gyroscope adalah alat yang mengukur seberapa cepat sebuah benda berputar, yaitu kecepatan rotasinya di sumbu X, Y, dan Z. Modul L3G4200D adalah salah satu gyroscope tiga sumbu yang populer di kalangan para pembuat dan pengembang sistem tertanam karena ukurannya yang kecil, kebutuhan daya yang rendah, dan kemampuannya memberikan data rotasi yang cukup akurat untuk berbagai aplikasi baik hobi maupun untuk prototipe profesional. Sensor ini sering digunakan dalam proyek seperti stabilisator kamera, robot yang seimbang sendiri, pengendali penerbangan untuk drone, sistem navigasi inersial, serta mendeteksi gerakan pada antarmuka berbasis gerakan.
Dalam tutorial ini, kita akan membahas L3G4200D dari awal, mulai dari penjelasan fungsinya, cara penyambungan yang aman, sampai contoh kode sederhana yang dapat kamu coba dengan Arduino. Selain langkah-langkah praktis, kamu juga akan mendapatkan penjelasan singkat tentang cara membaca nilai gyroscope, serta tips mengatasi masalah yang sering muncul ketika pertama kali menggunakan sensor ini. Tujuannya adalah agar kamu tidak hanya dapat mengoperasikan sensor, tetapi juga memahami kapan dan bagaimana hasilnya dapat diterapkan dalam proyek nyata. Jika kamu sudah siap, mari kita lanjutkan ke bagian komponen, penyambungan, dan contoh kodenya.
2. Mengenal Pin L3G4200D
Pada modul, biasanya kamu akan menemukan pin berikut:
| Pin | Fungsi |
|---|---|
| VCC | Input tegangan |
| GND | Ground |
| SCL | Clock I2C |
| SDA | Data I2C |
| CS | Pilih mode komunikasi (I2C/SPI) |
| SDO | Alamat I2C (LOW = 0x68, HIGH = 0x69) |
| DR / INT | Pin interrupt |
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan :
- Modul Gyroscope L3G4200D
- Arduino Uno
- Kabel jumper
- Breadboard
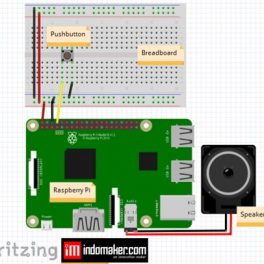
Wiring Rangkaian Sensor Gy-50 L3G4200D
- Pin VCC ke 5v
- Pin GND ke GND
- Pin SCL ke A5
- Pin SDA ke A40
- Pin SD0 ke 5V (untuk alamat 0x69)
- Pin CS ke 5v
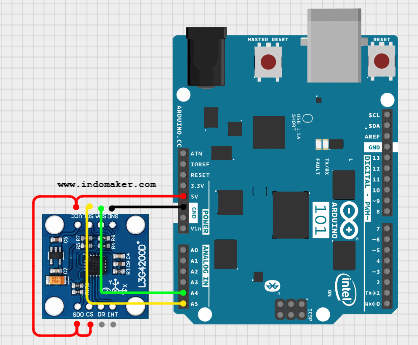
Gambar 1. Wiring Rangkaian Sensor Gy-50 L3G4200D
Library yang Digunakan
L3G4200D tidak termasuk dalam library default Arduino, jadi kita menggunakan library dari komunitas.
Install library berikut:
- Buka Arduino IDE
- Menu Sketch → Include Library → Manage Libraries
- Cari: L3G4200D (by Lukasz)
- Klik Install
Menulis Program Sensor Gy-50 L3G4200D
Setelah semua komponen terpasang, buka software Arduino IDE dan tulis kode berikut :
#include <Wire.h>
#define L3G4200D_Address 105 // 0x69
void setup() {
Serial.begin(9600);
Wire.begin();
setupL3G4200D(2000); // range ±2000 dps
}
void loop() {
int x, y, z;
readGyro(&x, &y, &z);
Serial.print("X: "); Serial.print(x);
Serial.print(" | Y: "); Serial.print(y);
Serial.print(" | Z: "); Serial.println(z);
delay(200);
}
void setupL3G4200D(int scale){
writeReg(0x20, 0x0F);
writeReg(0x23, 0x30);
}
void readGyro(int* x, int* y, int* z){
Wire.beginTransmission(L3G4200D_Address);
Wire.write(0x28 | 0x80);
Wire.endTransmission();
Wire.requestFrom(L3G4200D_Address, 6);
*x = Wire.read() | (Wire.read() << 8);
*y = Wire.read() | (Wire.read() << 8);
*z = Wire.read() | (Wire.read() << 8);
}
void writeReg(byte reg, byte val){
Wire.beginTransmission(L3G4200D_Address);
Wire.write(reg);
Wire.write(val);
Wire.endTransmission();
}
Penjelasan Kode
HMC5883L_Address: alamat I2C dari modul GY-50 (HMC5883L) yang digunakan untuk komunikasi data antara Arduino dan sensor.initHMC5883L(): fungsi untuk menginisialisasi sensor, mengatur mode pengukuran, konfigurasi register, dan memastikan sensor aktif sebelum membaca data.readHMC5883L(): mengambil data medan magnet dari tiga sumbu sensor (x,y,z) melalui register internal menggunakan komunikasi I2C.x,y,z: variabel yang menyimpan nilai medan magnet mentah untuk masing-masing sumbu dari sensor GY-50.atan2(y, x): rumus untuk menghitung arah kompas dari dua komponen medan magnet;atan2menentukan kuadran arah secara otomatis sehingga lebih akurat.heading: variabel yang menyimpan hasil sudut kompas dalam derajat setelah konversi dari radian; nilai inilah yang menjadi arah utara relatif.if (heading < 0) heading += 360;: memastikan hasil sudut tetap berada pada rentang 0°–360° dengan menghilangkan nilai negatif.
Cara Membaca Nilai Gyroscope
Sensor akan mengeluarkan nilai rotasi dalam satuan DPS (Degree Per Second).
Interpretasinya:
- X naik → sensor miring ke depan/belakang
- Y naik → sensor miring kiri/kanan
- Z naik → sensor diputar seperti memutar koin
Jika kamu gerakkan modul, nilai akan berubah cepat sesuai kecepatan rotasi.
Apa yang Akan Terjadi dengan Sensor GY-50?
Ketika rangkaian GY-50 dinyalakan dan koneksi I2C berada dalam kondisi yang benar, sensor akan mulai melakukan pembacaan gyro secara kontinu pada sumbu X, Y, dan Z. Setiap perubahan orientasi atau getaran kecil akan menghasilkan nilai kecepatan sudut yang berbeda-beda, dan data tersebut akan tampil di Serial Monitor secara stabil tanpa adanya lonjakan nilai yang tidak wajar. Hal ini menunjukkan bahwa konfigurasi mode I2C dan proses pembacaan register internal sensor berjalan dengan baik.
Jika rangkaian diberi gangguan seperti goyangan cepat atau rotasi mendadak, nilai output akan berubah secara responsif sesuai arah gerakan. Sebaliknya, ketika sensor didiamkan, data akan cenderung berada pada angka yang konstan sehingga memudahkan proses kalibrasi. Jika tombol reset pada sistem ditekan, Arduino akan menginisialisasi ulang komunikasi I2C, membuat sensor menjalankan konfigurasi awal kembali, dan pembacaan nilai gyro dimulai dari kondisi yang bersih tanpa data sisa dari proses sebelumnya.
Tutorial Mengambil Data Sudut dengan Sensor GY-50 L3G4200D berbasis Arduino Uno
Telegram? ya dengan fitur robot chat di telegram kita bisa mengontrol device dengan mudah dan praktis. Misal kita kelupaan... selengkapnya
Panel P10 LED Matrix merupakan sebuah display berisi kumpulan led-led yang disusun secara matrix. Fungsinya untuk menampilkan informasi berupa... selengkapnya
Alat dan Bahan ESP8266 Lolin(Wemos) NodeMcu v3 beli Modul MAX7219 LED dot matrix 8×8 beli Jenis Modul Modul MAX7219... selengkapnya
LED adalah singkatan dari Light Emiting Diode, yang merupakan sebuah dioda yang dapat mengubah energi listrik menjadi cahaya, dan... selengkapnya
Hallo ketemu lagi dengan pembahasan sensor DHT11, kali ini kita akan menggunakannya pada NodemMCU. Nanti akan dibahas mengenai rangkaian... selengkapnya

Push Button dan LED (Light Emitting Diode) menjadi sebuah komponen yang umum ditemukan pada piranti elektronik sehingga menjadikan... selengkapnya

Arduino Pro Micro adalah jenis arduino yang berukuran kecil, ukuranya hampir sama seperti Arduino Pro Mini. Secara fungsi dan... selengkapnya
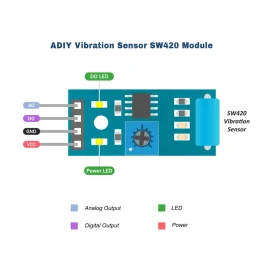
SW-420 adalah sensor untuk mendeteksi getaran, cara kerja sensor ini adalah dengan menggunakan 1 buah pelampung logam yang berisi 2... selengkapnya
Aktivitas manusia dalam kehidupan sehari-harinya tentu tidak jauh dari mendengarkan musik, menonton film atau streaming youtube baik untuk... selengkapnya

Hallo semuanya, kali ini saya akan mendemonstrasikan penggunaan RFID RC522 untuk membaca e-KTP maupun e-Toll. Pada postingan sebelumnya sudah... selengkapnya

MERK : TOWER PRO MG995 180 derajat Specifications Weight: 55 g Dimension: 40.7 x 19.7 x 42.9 mm approx. Stall… selengkapnya
Rp 36.300
Kabel Jumper Dupont Pelangi 10 cm female to female 1 lembar = 40 kabel
Rp 9.000
Menerima jasa cetak PCB FR2 (pertinax) / FR4 (double) single / double layer. Silahkan ke web kalkulator biaya cetak pcb… selengkapnya
Rp 1.000
Modul sensor tegangan AC bolak balik 1 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 21.000
Features – Calibrated directly in Celsius (Centigrade) – Linear + 10.0 mV/C scale factor – 0.5C accuracy guaranteeable (at +25C)… selengkapnya
Rp 8.000
Kinerja Produk: Warnanya coklat (amber), Goldfinger tape sticky baik, patuh, suhu tinggi, pelarut, tidak ada rembesan timah dan tidak ada… selengkapnya
Rp 11.900
Bagaimana jika mikrokontroler yang anda gunakan tidak memiliki port ADC. atau anda masih kurang dengan spesifikasi resolusi ADC yang disediakan… selengkapnya
Rp 65.000
Deskripsi Produk “LED Dot Matrix Display dengan 32×8 pixel, berwarna Merah, menggunakan IC MAX7219 sebagai driver dan dapat dikoneksikan ke… selengkapnya
Rp 47.500
Harga untuk 10pcs Resistance: 1K Ohm Wattage Rating: 0.25 Watt Tolerance: 1% Metal Film
Rp 1.500
Putaran = 180º Specifications • Weight: 55 g • Dimension: 40.7 x 19.7 x 42.9 mm approx. • Stall torque:… selengkapnya
Rp 36.400
Saat ini belum tersedia komentar.