
● online
- LCD 16x2 / 1602 Display Biru + I2C Backpack Sudah ....
- E18-D80NK Infrared Obstacle Avoidance Sensor Proxi....
- Sensor Api Flame detector sensor....
- SG90 Motor Servo For Arduino Uno Mega SG 90 Biru S....
- Motor Servo MG995 TowerPro Metal Gear....
- LED 3mm Lampu LED 3 mm....
- Potensiometer 10K - Mono Potensio Meter Linear Res....
- 10mm Kapton Tape Polymide Film Gold High Temp isol....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Mengendalikan Motor DC Menggunakan Arduino Uno dan Motor Driver MX1508
Motor merupakan salah satu komponen paling penting dalam dunia robotika karena memungkinkan sebuah sistem untuk bergerak secara fisik. Dengan motor, kamu bisa membuat berbagai proyek menarik seperti mobil robot, conveyor mini, hingga mekanisme otomatis lainnya. Namun, motor tidak bisa langsung dikendalikan dari pin Arduino Uno.
Alasannya sederhana: motor membutuhkan arus dan daya yang jauh lebih besar dibandingkan kemampuan pin digital Arduino. Selain itu, motor juga bisa menghasilkan tegangan balik saat berhenti atau berubah arah secara tiba-tiba, yang berisiko merusak Arduino. Karena itulah dibutuhkan motor driver sebagai perantara agar motor bisa dikendalikan dengan aman.
Pada percobaan ini, kamu akan belajar cara mengendalikan empat motor DC menggunakan Arduino Uno dan motor driver MX1508. Sebelum digunakan untuk sistem robot, setiap motor akan diuji untuk memastikan arah putaran dan koneksi sudah benar.
Cara Kerja Sistem Kendali Motor
Arduino mengirimkan sinyal logika ke pin input motor driver. Ketika satu pin bernilai HIGH dan pasangannya bernilai LOW, motor akan berputar ke satu arah. Jika kombinasi logika dibalik, motor akan berputar ke arah sebaliknya. Ketika kedua pin bernilai LOW, motor akan berhenti.
Dengan mengatur beberapa motor secara bersamaan, Arduino dapat mengontrol pergerakan mobil robot, seperti maju, berhenti, dan mundur.
Alat dan Bahan yang Diperlukan
Untuk menjalankan percobaan ini, siapkan komponen berikut:
- Arduino Uno Trainer Kit
- Motor driver MX1508
- Motor DC
- Baterai sebagai sumber daya motor
- Roda atau ban mobil mainan
- Kabel jumper
- Software Arduino IDE
Wiring Rangkaian Motor Driver
Sebelum menulis program, susun terlebih dahulu rangkaian motor driver dengan Arduino Uno.
- Motor driver dihubungkan ke sumber daya motor melalui pin positif dan ground.
- Setiap motor DC dihubungkan ke keluaran motor driver.
Pin kendali motor driver dihubungkan ke pin digital Arduino sebagai berikut:
Motor Driver 1
- IN1 ke pin D13 Arduino
- IN2 ke pin D12 Arduino
- IN3 ke pin D11 Arduino
- IN4 ke pin D10 Arduino
Motor Driver 2
- IN1 ke pin D9 Arduino
- IN2 ke pin D8 Arduino
- IN3 ke pin D7 Arduino
- IN4 ke pin D6 Arduino
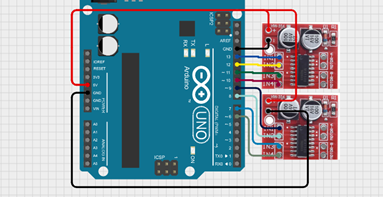
Gambar 1. Wiring Rangkaian Menggerakan Motor Driver
Setiap pasangan pin IN digunakan untuk mengatur satu motor, dengan kombinasi logika tertentu untuk menentukan arah putaran.
Menulis Program Menggerakkan Motor DC
Setelah rangkaian terpasang dengan benar, buka Arduino IDE, lalu tuliskan program berikut dan unggah ke papan Arduino Uno.
// ===== DRIVER 1 =====
#define D1_IN1 13
#define D1_IN2 12
#define D1_IN3 11
#define D1_IN4 10
// ===== DRIVER 2 =====
#define D2_IN1 9
#define D2_IN2 8
#define D2_IN3 7
#define D2_IN4 6
void setup() {
pinMode(D1_IN1, OUTPUT);
pinMode(D1_IN2, OUTPUT);
pinMode(D1_IN3, OUTPUT);
pinMode(D1_IN4, OUTPUT);
pinMode(D2_IN1, OUTPUT);
pinMode(D2_IN2, OUTPUT);
pinMode(D2_IN3, OUTPUT);
pinMode(D2_IN4, OUTPUT);
Serial.begin(9600);
Serial.println("2 Motor Driver MX1508 siap digunakan");
}
void loop() {
Serial.println("SEMUA MOTOR MAJU");
semuaMotorMaju();
delay(2000);
Serial.println("SEMUA MOTOR STOP");
stopSemuaMotor();
delay(1000);
Serial.println("SEMUA MOTOR MUNDUR");
semuaMotorMundur();
delay(2000);
Serial.println("SEMUA MOTOR STOP");
stopSemuaMotor();
delay(2000);
}
// ===== FUNGSI =====
void semuaMotorMaju() {
digitalWrite(D1_IN1, LOW);
digitalWrite(D1_IN2, HIGH);
digitalWrite(D1_IN3, LOW);
digitalWrite(D1_IN4, HIGH);
digitalWrite(D2_IN1, LOW);
digitalWrite(D2_IN2, HIGH);
digitalWrite(D2_IN3, HIGH);
digitalWrite(D2_IN4, LOW);
}
void semuaMotorMundur() {
digitalWrite(D1_IN1, HIGH);
digitalWrite(D1_IN2, LOW);
digitalWrite(D1_IN3, HIGH);
digitalWrite(D1_IN4, LOW);
digitalWrite(D2_IN1, HIGH);
digitalWrite(D2_IN2, LOW);
digitalWrite(D2_IN3, LOW);
digitalWrite(D2_IN4, HIGH);
}
void stopSemuaMotor() {
digitalWrite(D1_IN1, LOW);
digitalWrite(D1_IN2, LOW);
digitalWrite(D1_IN3, LOW);
digitalWrite(D1_IN4, LOW);
digitalWrite(D2_IN1, LOW);
digitalWrite(D2_IN2, LOW);
digitalWrite(D2_IN3, LOW);
digitalWrite(D2_IN4, LOW);
}
Penjelasan Kode
- #define D1_IN1 13 hingga #define D1_IN4 10 digunakan untuk mendefinisikan pin kendali motor driver pertama agar mudah dipanggil dalam program
- #define D2_IN1 9 hingga #define D2_IN4 6 digunakan untuk mendefinisikan pin kendali motor driver kedua, dengan penyesuaian arah pada salah satu channel
- pinMode(…, OUTPUT); digunakan untuk mengatur seluruh pin yang terhubung ke motor driver sebagai keluaran
- semuaMotorMaju(); digunakan untuk menjalankan seluruh motor ke arah maju dengan kombinasi logika yang sesuai
- semuaMotorMundur(); digunakan untuk menjalankan seluruh motor ke arah mundur dengan kombinasi logika kebalikan dari arah maju
- stopSemuaMotor(); digunakan untuk menghentikan seluruh motor dengan mematikan semua pin kendali
- digitalWrite(…, HIGH atau LOW); digunakan untuk mengatur arah putaran motor melalui motor driver
Hasil Percobaan
Setelah program diunggah dan rangkaian terhubung dengan benar, sistem akan berjalan sesuai urutan yang telah ditentukan. Pada tahap pertama, seluruh motor akan bergerak maju secara bersamaan. Pergerakan ini menunjukkan bahwa Arduino berhasil mengirimkan sinyal kendali yang tepat ke kedua motor driver, termasuk penyesuaian arah motor yang memiliki orientasi terbalik.
Gambar 2. Hasil Percobaan Menggerakan Motor
Setelah beberapa detik, semua motor akan berhenti sejenak. Kondisi ini menandakan bahwa perintah penghentian motor bekerja dengan baik dan sistem berada dalam keadaan aman. Selanjutnya, motor akan bergerak mundur dengan arah putaran yang berlawanan, tanpa perlu mengubah sambungan kabel.
Siklus maju, berhenti, dan mundur akan terus berulang selama Arduino mendapatkan catu daya. Percobaan ini membuktikan bahwa Arduino Uno mampu mengendalikan beberapa motor DC secara bersamaan dengan stabil dan menjadi dasar yang kuat untuk pengembangan robot bergerak yang lebih kompleks.
Tutorial Mengendalikan Motor DC Menggunakan Arduino Uno dan Motor Driver MX1508

Ketemu lagi dengan sensor DS18b20, kali ini akan kita monitoring menggunakan aplikasi Blynk dan ESP-01. Langsung saja ya kita... selengkapnya
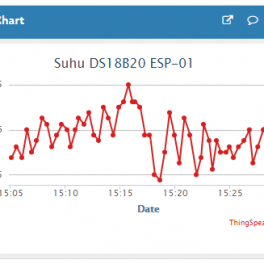
Jumpa lagi dengan tutorial mengenai thingspeak, kali ini akan dibahas cara menampilkan data suhu pada Thingspeak menggunakan ESP-01 dan... selengkapnya

HK1600B merupakan salah satu sensor tekanan yang mudah kita temukan di pasaran, dengan output analog linear dari 0.5V hingga 4.5V,... selengkapnya
Apa itu relay? Relay merupakan sebuah saklar yang dikendalikan dengan aliran arus listrik. Pada relay terdapat 2 bagian utama... selengkapnya
Telegram? ya dengan fitur robot chat di telegram kita bisa mengontrol device dengan mudah dan praktis. Misal kita kelupaan... selengkapnya

Hallo apa kabar pada artikel ini saya berbagi cara kontrol led menggunakan potensiometer pada NodeMCU. Jadi nanti akan mengatur... selengkapnya
Tombol adalah salah satu komponen input paling sederhana namun sangat penting dalam berbagai proyek elektronika. Dalam tutorial ini, kamu akan... selengkapnya
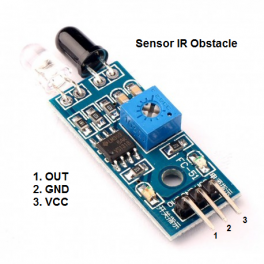
Sensor IR adalah sebuah sensor yang dapat mendeteksi rintangan menggunakan cahaya inframerah yang dipantulkan. Sensor ini mempunyai dua bagian... selengkapnya
Rain sensor merupakan sensor yang berfungsi untuk mendeteksi hujan turun atau tidak. Intinya sensor ini jika terkena air pada... selengkapnya
Setelah kemarin-kemarin sudah sering membahas board esp8266 dengan jenis NodeMCU. Kali ini kita belajar dengan jenis lain yaitu ESP-01,... selengkapnya

Product Name: Tactile Switch; Material: Metal, Plastic Package Content: 30 Pcs x Tactile Switch; Main Color: Black, Silver Tone Total… selengkapnya
Rp 400
Dimmer AC 220 Volt 4000 Watt + Casing Aluminium Potensiometer untuk mengatur tegangan output min/max pada tegangan AC PLN 220V…. selengkapnya
Rp 52.500
Harga untuk 10pcs Resistance: 1K Ohm Wattage Rating: 0.25 Watt Tolerance: 1% Metal Film
Rp 1.500
Dual Volt Amp Meter Digital Ampere Meter Voltmeter 10A 0-100V Ammeter Dilengkapi dengan pengukuran Voltmeter dan Amperemeter dalam 1 display… selengkapnya
Rp 26.500
Modul sensor tegangan AC bolak balik 1 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 21.000
sg90 towerpro penggerak pada robot-robot kecil, dan bisa digunakan sebagai alat untuk hobi membuat robot dsb, dengan berat sekitar 9g… selengkapnya
Rp 15.500
Features: Brand new and high quality. Control the speed of a DC motor with this controller. High efficiency, high torque,… selengkapnya
Rp 25.400
12A 300W DC Buck Step Down Converter CC CV Driver LED charge Battery Spesifikasi: Input Voltage: 5-40V Output Voltage: 1.2-35V… selengkapnya
Rp 39.400
Kabel Jumper Dupont Pelangi 10 cm female to female 1 lembar = 40 kabel
Rp 9.000
Fitur: -Dapat mendeteksi api atau panjang gelombang sumber cahaya dalam 760nm ~ 1100nm – Api lebih ringan mendeteksi jarak 80cm… selengkapnya
Rp 9.000
Saat ini belum tersedia komentar.