
● online
- Motor servo MG996R TowerPro Metal Gear
- Kabel Jumper 10cm Dupont Pelangi 10 cm Male to Mal
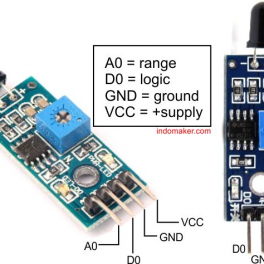
- Water Level sensor ketinggian air - deteksi air
- Modul Sensor Tegangan AC Bolak balik 220V Listrik
- TP5100 4.2v 8.4v 1S 2S Single / Double Cell Lithiu
- Dual Volt Amp Meter Digital Ampere Meter Voltmeter
- LED 3mm Lampu LED 3 mm
- B0505S-1W 5V to 5V converter DC DC power module co
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Menggerakan Motor dengan Raspberry Pi
Motor jadi salah satu komponen elektronik yang seru buat kita pelajari, dengan motor kita bahkan bisa buat mobil mainan yang bisa bergerak leluasa. Tapi motor nggak bisa langsung dikendalikan lewat pin GPIO di Raspberry Pi, soalnya motor butuh suplai daya variabel (biasanya 5 volt) yang lebih besar dari kemampuan GPIO. Jadi, kamu harus kasih daya terpisah. Untuk itu, kita bisa pakai motor driver board supaya Raspberry Pi bisa mengontrol motor dengan aman.
Di panduan ini, kamu akan belajar cara mengontrol empat motor dari Raspberry Pi pakai bahasa Python, namun sebelum bisa mengendalikan keempat roda, kita juga perlu mengecek satu-persatu bagian motornya.
H-Bridge
 Gambar 1. Schematic dari H-Bridge
Gambar 1. Schematic dari H-Bridge
Motor bisa jalan maju atau mundur, tergantung arah aliran arus listriknya. Tapi masa iya harus bolak-balik pasang kabel setiap mau ganti arah putaran motor? Ribet, kan?
Nah, karena itulah motor driver biasanya sudah punya H-bridge. H-bridge adalah rangkaian yang pakai 4 transistor buat ngatur arah arus secara digital, jadi kamu tinggal kontrol dari kode, gak perlu sentuh kabel.
Biasanya, di dalam H-bridge juga ada flyback diode. Fungsinya adalah mencegah lonjakan tegangan balik yang bisa muncul waktu motor dimatikan tapi masih berputar, supaya gak merusak komponen elektronik lainnya.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan:
- Raspberry Pi Trainer Kit v2
- Motor driver mx1508
- Motor
- Baterai
- Ban mobil mainan
- Kabel jumper
- Software:
- MobaXterm (untuk remote terminal)
- Notepad++ (untuk menulis skrip Python)
Wiring Rangkaian Percobaan Motor
Susun rangkaian dengan panduan seperti ini:
- Pin + MX1508 ke 5V
- Pin – MX1508 ke GND
- Pin A1 ke GPIO 17
- Pin A2 ke GPIO 27
- Pin B1 ke GPIO 22
- Pin B2 ke GPIO 23
- Pin A1 ke GPIO 4
- Pin A2 ke GPIO 24
- Pin B1 ke GPIO 5
- Pin B2 ke GPIO 6

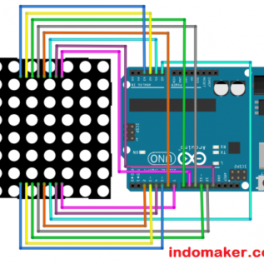
Gambar 2. Wiring Rangkaian Motor Driver dan Raspberry Pi
Menulis Program Motor Driver
Setelah semua komponen terpasang, buka Notepad++ dan buat file Python baru. Tulis kode berikut dan simpan file dengan nama cek motor.py :
import RPi.GPIO as GPIO
import time
IN1 = 17 #ganti gpio untuk pengecekan
IN2 = 27 #ganti gpio untuk pengecekan
GPIO.setmode(GPIO.BCM)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
def motor_forward():
GPIO.output(IN1, GPIO.HIGH)
GPIO.output(IN2, GPIO.LOW)
def motor_backward():
GPIO.output(IN1, GPIO.LOW)
GPIO.output(IN2, GPIO.HIGH)
def motor_stop():
GPIO.output(IN1, GPIO.LOW)
GPIO.output(IN2, GPIO.LOW)
try:
print("Cek motor maju...")
motor_forward()
time.sleep(2)
print("Cek motor mundur...")
motor_backward()
time.sleep(2)
print("Berhenti")
motor_stop()
except KeyboardInterrupt:
print("Dihentikan oleh user.")
finally:
GPIO.cleanup()
Kamu bisa ganti tiap GPIO untuk cek satu persatu channel dan motor, pastikan tiap motor dapat bergerak dan tidak berlawanan arah dari yang diharapkan. Dengan kode ini motor akan bergerak maju selama 2 detik, kemudian bergerak mundur 2 detik dan berhenti.
Apabila sudah di pastikan seluruh motor berfungsi dengan baik, maka kita bisa melanjutkan ke kode selanjutnya, pastikan jangan lupa simpan file dengan nama motor.py
import RPi.GPIO as GPIO
import time
# GPIO Pin setup
motor_pins = {
"kiri_depan": (17, 27),
"kiri_belakang": (22, 23),
"kanan_depan": (4, 24),
"kanan_belakang": (5, 6)
}
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
for pin_pair in motor_pins.values():
GPIO.setup(pin_pair[0], GPIO.OUT)
GPIO.setup(pin_pair[1], GPIO.OUT)
def maju_motor(pin1, pin2):
GPIO.output(pin1, GPIO.HIGH)
GPIO.output(pin2, GPIO.LOW)
def maju_semua():
for motor, (pin1, pin2) in motor_pins.items():
maju_motor(pin1, pin2)
print(f"{motor} maju")
try:
print("Semua motor maju terus...")
maju_semua()
while True:
time.sleep(1)
except KeyboardInterrupt:
print("Berhenti oleh user.")
GPIO.cleanup()
Penjelasan kode
motor_pins = {...}menyimpan pin GPIO untuk masing-masing motor.GPIO.setmode(GPIO.BCM)memilih penomoran pin berdasarkan BCM.GPIO.setup(..., GPIO.OUT)mengatur semua pin sebagai output.maju_motor()mengaktifkan satu motor untuk bergerak maju.maju_semua()menjalankan semua motor ke arah maju.while Truemenjaga motor tetap menyala.KeyboardInterruptmenangani saat pengguna menekan Ctrl + C.GPIO.cleanup()membersihkan konfigurasi GPIO.
Apa yang akan terjadi?

Saat program dijalankan, Raspberry Pi akan mengatur pin GPIO untuk mengontrol empat motor. Semua motor akan bergerak maju secara bersamaan dan terus berputar karena berada dalam loop tak terbatas. Motor baru akan berhenti apabila menekan Ctrl + C pada terminal, program akan berhenti dan semua pin GPIO akan dimatikan dengan aman. Ini menciptakan gerakan maju otomatis untuk mobil robot berbasis Raspberry Pi.
Tutorial Menggerakan Motor dengan Raspberry Pi
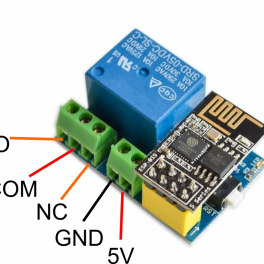
Tidak jauh-jauh dari shield ESP-01 lagi, kali ini akan membahas module shield untuk relay. Cukup praktis dan hemat size... selengkapnya
Pada umumnya sebuah output data dapat kita tampilkan di berbagai platform software maupun hardware. Misalnya pada web, aplikasi android,... selengkapnya
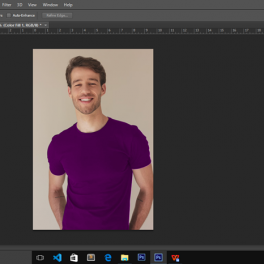
Pernahkah Anda melihat katalog busana muslimah ataupun lainnya, lalu ada objek orang yang sama dengan mengunakan baju berwarna tetapi... selengkapnya
Flame sensor sangat sensitif terhadap nyala api (cahaya) dan radiasi di sekitarnya. Sensor ini dapat mendeteksi sumber cahaya biasa... selengkapnya
Panel P10 LED Matrix merupakan sebuah display berisi kumpulan led-led yang disusun secara matrix. Fungsinya untuk menampilkan informasi berupa... selengkapnya
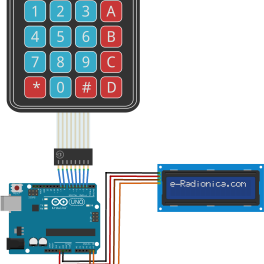
Keypad 4×4 berfungsi sebagai penghubung antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah Human Machine Interface (HMI). Papan... selengkapnya

LCD atau Liquid Crystal Display adalah perangkat yang berfungsi sebagai media penampil dengan memanfaatkan kristal cair sebagai objek penampil utama.... selengkapnya
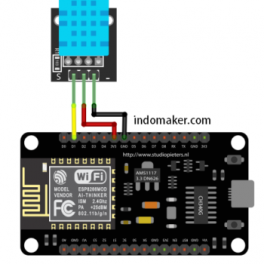
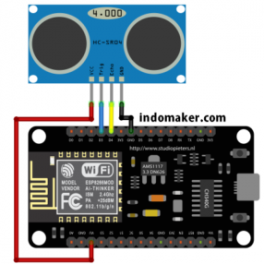
Pemanfaatan sebuah sensor bisa dijadikan berbagai fungsi, nah kali ini kita akan belajar untuk memonitoring sensor menggunakan WIFI yang... selengkapnya

Kalau kamu tertarik belajar elektronika, robotika, atau ingin membuat proyek-proyek interaktif sendiri, Arduino adalah salah satu platform terbaik untuk memulainya.... selengkapnya
8×8 LED dot matrix merupakan sebuah display yang terdiri dari kumpulan led yang disusun secara simetris sejumlah 8 baris... selengkapnya
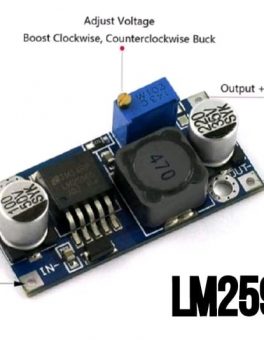
Penurun tegangan DC-DC ekonomis yang bisa distel tegangan output nya. Cocok untuk pemasangan variasi mobil dan sepeda motor, dijadikan charger… selengkapnya
Rp 9.000
Menerima jasa cetak PCB FR2 (pertinax) / FR4 (double) single / double layer. Silahkan ke web kalkulator biaya cetak pcb… selengkapnya
Rp 1.000
Kabel Jumper Dupont Pelangi 10 cm male to male 1 lembar = 40 kabel
Rp 13.000
Bosan dengan modul arduino yang kalian punya, saatnya mencoba modul programmer yang lain yah ini dia RASPBERRY PI 4 COMPUTER… selengkapnya
Rp 1.570.000
Kabel Jumper Dupont Pelangi 30cm Male to Female 1 lembar = 40 kabel
Rp 13.500
Buruan dibeli gan….barang murah-berkualitas SIAPA CEPAT DIA DAPAT Spesifikasi: LCD 1602 / 16×2 (16 karakter, 2 baris) merek QAPASS (cek… selengkapnya
Rp 24.500
Spesifikasi: 50mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 75.000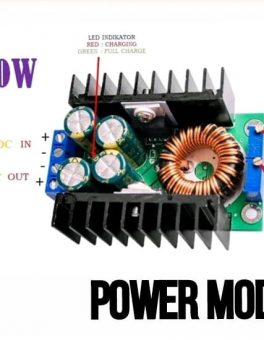
12A 300W DC Buck Step Down Converter CC CV Driver LED charge Battery Spesifikasi: Input Voltage: 5-40V Output Voltage: 1.2-35V… selengkapnya
Rp 39.400
Features and Specs: Dual-Core, 32-bit ARM Cortex M0+ Processor Clocked at 48MHz (default), configurable max to 133MHz. Ready with USB… selengkapnya
Rp 82.900
Features: It is of high power density, high efficiency, high-reliability, small size and lightweight. It can isolate unsteady single-way voltage… selengkapnya
Rp 18.500
Saat ini belum tersedia komentar.