
● online
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang
- Raspberry Pi 4 Model B 8GB Original UK E14 Raspi 4
- Water Level sensor ketinggian air - deteksi air
- Relay Module 1 Channel Modul Relay 5V 10A 1 Channe
- Kabel Jumper arduino Dupont Pelangi 30 cm Male to
- B0505S-1W 5V to 5V converter DC DC power module co
- LDR Sensor 5mm Cahaya 5528 Light Dependent Resisto
- E18-D80NK Infrared Obstacle Avoidance Sensor Proxi
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Menggerakan Motor dengan Raspberry Pi
Motor jadi salah satu komponen elektronik yang seru buat kita pelajari, dengan motor kita bahkan bisa buat mobil mainan yang bisa bergerak leluasa. Tapi motor nggak bisa langsung dikendalikan lewat pin GPIO di Raspberry Pi, soalnya motor butuh suplai daya variabel (biasanya 5 volt) yang lebih besar dari kemampuan GPIO. Jadi, kamu harus kasih daya terpisah. Untuk itu, kita bisa pakai motor driver board supaya Raspberry Pi bisa mengontrol motor dengan aman.
Di panduan ini, kamu akan belajar cara mengontrol empat motor dari Raspberry Pi pakai bahasa Python, namun sebelum bisa mengendalikan keempat roda, kita juga perlu mengecek satu-persatu bagian motornya.
H-Bridge
 Gambar 1. Schematic dari H-Bridge
Gambar 1. Schematic dari H-Bridge
Motor bisa jalan maju atau mundur, tergantung arah aliran arus listriknya. Tapi masa iya harus bolak-balik pasang kabel setiap mau ganti arah putaran motor? Ribet, kan?
Nah, karena itulah motor driver biasanya sudah punya H-bridge. H-bridge adalah rangkaian yang pakai 4 transistor buat ngatur arah arus secara digital, jadi kamu tinggal kontrol dari kode, gak perlu sentuh kabel.
Biasanya, di dalam H-bridge juga ada flyback diode. Fungsinya adalah mencegah lonjakan tegangan balik yang bisa muncul waktu motor dimatikan tapi masih berputar, supaya gak merusak komponen elektronik lainnya.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan:
- Raspberry Pi Trainer Kit v2
- Motor driver mx1508
- Motor
- Baterai
- Ban mobil mainan
- Kabel jumper
- Software:
- MobaXterm (untuk remote terminal)
- Notepad++ (untuk menulis skrip Python)
Wiring Rangkaian Percobaan Motor
Susun rangkaian dengan panduan seperti ini:
- Pin + MX1508 ke 5V
- Pin – MX1508 ke GND
- Pin A1 ke GPIO 17
- Pin A2 ke GPIO 27
- Pin B1 ke GPIO 22
- Pin B2 ke GPIO 23
- Pin A1 ke GPIO 4
- Pin A2 ke GPIO 24
- Pin B1 ke GPIO 5
- Pin B2 ke GPIO 6

Gambar 2. Wiring Rangkaian Motor Driver dan Raspberry Pi
Menulis Program Motor Driver
Setelah semua komponen terpasang, buka Notepad++ dan buat file Python baru. Tulis kode berikut dan simpan file dengan nama cek motor.py :
import RPi.GPIO as GPIO
import time
IN1 = 17 #ganti gpio untuk pengecekan
IN2 = 27 #ganti gpio untuk pengecekan
GPIO.setmode(GPIO.BCM)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
def motor_forward():
GPIO.output(IN1, GPIO.HIGH)
GPIO.output(IN2, GPIO.LOW)
def motor_backward():
GPIO.output(IN1, GPIO.LOW)
GPIO.output(IN2, GPIO.HIGH)
def motor_stop():
GPIO.output(IN1, GPIO.LOW)
GPIO.output(IN2, GPIO.LOW)
try:
print("Cek motor maju...")
motor_forward()
time.sleep(2)
print("Cek motor mundur...")
motor_backward()
time.sleep(2)
print("Berhenti")
motor_stop()
except KeyboardInterrupt:
print("Dihentikan oleh user.")
finally:
GPIO.cleanup()
Kamu bisa ganti tiap GPIO untuk cek satu persatu channel dan motor, pastikan tiap motor dapat bergerak dan tidak berlawanan arah dari yang diharapkan. Dengan kode ini motor akan bergerak maju selama 2 detik, kemudian bergerak mundur 2 detik dan berhenti.
Apabila sudah di pastikan seluruh motor berfungsi dengan baik, maka kita bisa melanjutkan ke kode selanjutnya, pastikan jangan lupa simpan file dengan nama motor.py
import RPi.GPIO as GPIO
import time
# GPIO Pin setup
motor_pins = {
"kiri_depan": (17, 27),
"kiri_belakang": (22, 23),
"kanan_depan": (4, 24),
"kanan_belakang": (5, 6)
}
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
for pin_pair in motor_pins.values():
GPIO.setup(pin_pair[0], GPIO.OUT)
GPIO.setup(pin_pair[1], GPIO.OUT)
def maju_motor(pin1, pin2):
GPIO.output(pin1, GPIO.HIGH)
GPIO.output(pin2, GPIO.LOW)
def maju_semua():
for motor, (pin1, pin2) in motor_pins.items():
maju_motor(pin1, pin2)
print(f"{motor} maju")
try:
print("Semua motor maju terus...")
maju_semua()
while True:
time.sleep(1)
except KeyboardInterrupt:
print("Berhenti oleh user.")
GPIO.cleanup()
Penjelasan kode
motor_pins = {...}menyimpan pin GPIO untuk masing-masing motor.GPIO.setmode(GPIO.BCM)memilih penomoran pin berdasarkan BCM.GPIO.setup(..., GPIO.OUT)mengatur semua pin sebagai output.maju_motor()mengaktifkan satu motor untuk bergerak maju.maju_semua()menjalankan semua motor ke arah maju.while Truemenjaga motor tetap menyala.KeyboardInterruptmenangani saat pengguna menekan Ctrl + C.GPIO.cleanup()membersihkan konfigurasi GPIO.
Apa yang akan terjadi?

Saat program dijalankan, Raspberry Pi akan mengatur pin GPIO untuk mengontrol empat motor. Semua motor akan bergerak maju secara bersamaan dan terus berputar karena berada dalam loop tak terbatas. Motor baru akan berhenti apabila menekan Ctrl + C pada terminal, program akan berhenti dan semua pin GPIO akan dimatikan dengan aman. Ini menciptakan gerakan maju otomatis untuk mobil robot berbasis Raspberry Pi.
Tutorial Menggerakan Motor dengan Raspberry Pi
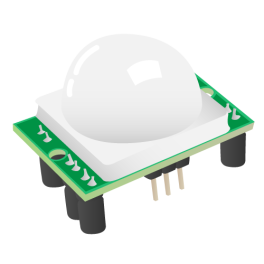
Sensor PIR (Passive Infrared) adalah salah satu sensor yang paling sering digunakan untuk mendeteksi gerakan, terutama gerakan manusia. Sensor ini... selengkapnya
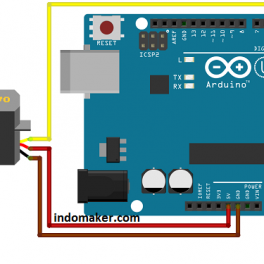
Pada artikel ini saya akan memberikan cara cepat menggunakan motor servo pada Arduino. Pasti tentunya anda sedang mencari tutorial-tutorial... selengkapnya
Alarm sangat diperlukan untuk keamanan tertentu, misalnya pada rumah, toko, maupun yang berupa barang-barang berharga lainnya dari pencuri. Tentunya... selengkapnya
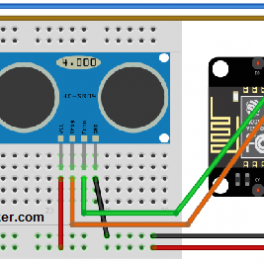
Sensor ultrasonik merupakan sensor yang menggunakan gelombang ultrasonik. Gelombang ultrasonik yaitu gelombang yang umum digunakan untuk mendeteksi keberadaan suatu benda... selengkapnya
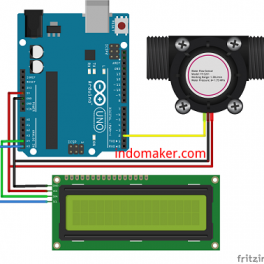
Flow meter yaitu sebuah sensor yang berfungsi untuk menghitung aliran air (debit) dan volume air dalam suatu alur dan... selengkapnya
Halo semuanya, pada kesempatan kali ini saya ingin berbagi tutorial tentang simulasi penggunaan sensor PIR (Passive Infra Red) untuk... selengkapnya
Thingsboard merupakan sebuah platform IoT open-source yang memungkinkan anda untuk mengontrol ataupun memonitoring berbagai perangkat. Penggunaanya mudah, gratis dan... selengkapnya
SMS gateway merupakan layanan yang berguna untuk meneruskan pesan ke jaringan seluler lain... selengkapnya

Apa itu efek autumn? Efek autumn adalah efek musim gugur, dimana dedaunan akan berubah warna dari hijau menjadi coklat... selengkapnya
Melanjutakan tutorial edisi telegram kali ini kita akan mendetekesi suhu meggunakan sensor Ds18b20 dan ESP01. Dalam tutorial ini kita... selengkapnya

Kabel Jumper Dupont Pelangi 10 cm.. male to female 1 lembar isi 40 kabel
Rp 9.000
Features – Calibrated directly in Celsius (Centigrade) – Linear + 10.0 mV/C scale factor – 0.5C accuracy guaranteeable (at +25C)… selengkapnya
Rp 8.000
Deskripsi Produk “LED Dot Matrix Display dengan 32×8 pixel, berwarna Merah, menggunakan IC MAX7219 sebagai driver dan dapat dikoneksikan ke… selengkapnya
Rp 47.500
Ini yang Seri SN – DS3231 I2C RTC Module khusus DS3231SN – Include Baterai – Module jam digital – Keperluan… selengkapnya
Rp 34.900
Bosan dengan modul arduino yang kalian punya, saatnya mencoba modul programmer yang lain yah ini dia RASPBERRY PI 4 COMPUTER… selengkapnya
Rp 1.570.000
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750Kabel jumper Dupont untuk jumper Arduino atau Raspeberry Pi 20 cm Female to female 1 lembar = 40 kabel
Rp 11.300
Putaran = 180º Specifications • Weight: 55 g • Dimension: 40.7 x 19.7 x 42.9 mm approx. • Stall torque:… selengkapnya
Rp 36.400
Compatibility: USB v2.0 standard Interface: Network: USB Series: RS-485 Port: an independent RS-485 Connector: Network: USB type A connector Series:… selengkapnya
Rp 38.800
Spesifikasi : – 16×2 – Warna Biru – Tegangan kerja : 5v Digunakan untuk keperluan display project seperti Arduino, Raspberry,… selengkapnya
Rp 17.000
Saat ini belum tersedia komentar.