
● online
- LED 3mm Lampu LED 3 mm....
- TANG CRIMPING PRESS SKUN RATCHET YTH SN-48B....
- Kabel Jumper 20cm Dupont 20 cm Female to Female Pe....
- LDR Sensor 5mm Cahaya 5528 Light Dependent Resisto....
- SG90 Motor Servo For Arduino Uno Mega SG 90 Biru S....
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to M....
- B0505S-1W 5V to 5V converter DC DC power module co....
- ADS1115 16 Bit I2C Module ADC 4 channel with Pro G....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Menggerakkan Motor Servo sebagai Leher Robot Menggunakan Arduino Uno
Motor servo merupakan salah satu aktuator yang paling sering digunakan dalam dunia robotika, terutama untuk gerakan yang membutuhkan ketelitian posisi. Berbeda dengan motor DC yang hanya berputar terus menerus, motor servo mampu bergerak ke sudut tertentu dan mempertahankan posisi tersebut selama masih menerima sinyal kendali.
Karena kemampuannya ini, motor servo sangat cocok digunakan untuk mensimulasikan gerakan leher robot, seperti gerakan mengangguk dan menggeleng. Pada percobaan ini, kamu akan belajar mengendalikan dua buah motor servo menggunakan Arduino Uno untuk menirukan gerakan leher robot secara halus dan alami.
Gambaran Sistem Gerakan Leher Robot dengan Motor Servo
Pada sistem ini, Arduino Uno berperan sebagai pengendali utama yang menghasilkan sinyal PWM untuk mengatur posisi motor servo. Dua motor servo digunakan dengan fungsi yang berbeda:
Servo pertama berfungsi sebagai servo angguk, yang menghasilkan gerakan naik dan turun.
Servo kedua berfungsi sebagai servo geleng, yang menghasilkan gerakan ke kiri dan ke kanan.
Kedua servo diatur agar bergerak secara bertahap, sehingga pergerakan yang dihasilkan terlihat lebih natural dan tidak kaku.
Alat dan Bahan yang Diperlukan
Untuk menjalankan percobaan ini, siapkan komponen berikut:
- Arduino Uno Trainer Kit
- Motor servo
- Kabel jumper
- Software Arduino IDE
Menulis Program Menggerakkan Motor Servo
Setelah rangkaian terpasang dengan benar, buka Arduino IDE, lalu tuliskan program berikut dan unggah ke papan Arduino Uno.
#include <Servo.h>
Servo servoAngguk;
Servo servoGeleng;
int pinAngguk = 9;
int pinGeleng = 10;
// Kalibrasi sudut
int anggukNetral = 125;
int anggukTurun = 95;
int gelengTengah = 90;
int gelengKiri = 45;
int gelengKanan = 115;
// Fungsi gerak halus
void gerakHalus(Servo &servo, int dari, int ke, int jeda) {
if (dari < ke) {
for (int sudut = dari; sudut <= ke; sudut++) {
servo.write(sudut);
delay(jeda);
}
} else {
for (int sudut = dari; sudut >= ke; sudut--) {
servo.write(sudut);
delay(jeda);
}
}
}
void setup() {
servoAngguk.attach(pinAngguk);
servoGeleng.attach(pinGeleng);
servoAngguk.write(anggukNetral);
servoGeleng.write(gelengTengah);
delay(1000);
}
void loop() {
// Gerakan angguk
gerakHalus(servoAngguk, anggukNetral, anggukTurun, 15);
gerakHalus(servoAngguk, anggukTurun, anggukNetral, 15);
delay(300);
// Gerakan geleng
gerakHalus(servoGeleng, gelengTengah, gelengKiri, 12);
gerakHalus(servoGeleng, gelengKiri, gelengKanan, 12);
gerakHalus(servoGeleng, gelengKanan, gelengTengah, 12);
delay(500);
}
Penjelasan Kode
- #include <Servo.h> digunakan untuk memanggil pustaka servo bawaan Arduino
- Servo servoAngguk dan Servo servoGeleng digunakan untuk membuat objek servo
- pinAngguk dan pinGeleng digunakan untuk menentukan pin digital Arduino yang terhubung ke masing masing servo
- anggukNetral dan anggukTurun digunakan untuk mengatur posisi netral dan posisi menunduk pada servo angguk
- gelengTengah, gelengKiri, dan gelengKanan digunakan untuk mengatur posisi tengah, kiri, dan kanan pada servo geleng
- gerakHalus() digunakan untuk menggerakkan servo secara bertahap agar pergerakan tidak patah patah
- attach() digunakan untuk menghubungkan objek servo dengan pin Arduino
- write() digunakan untuk mengatur sudut motor servo dalam satuan derajat
Hasil Percobaan
Setelah program diunggah dan Arduino diberi catu daya, kedua motor servo akan mulai bergerak sesuai urutan yang telah ditentukan. Pada kondisi awal, servo angguk berada pada posisi netral dan servo geleng berada pada posisi tengah.
Servo angguk kemudian bergerak perlahan ke posisi menunduk dan kembali ke posisi awal. Setelah itu, servo geleng bergerak ke kiri, ke kanan, dan kembali ke tengah dengan pergerakan yang stabil dan tidak patah-patah. Seluruh gerakan berlangsung dengan halus karena sudut servo diubah secara bertahap.
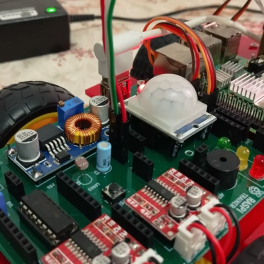
Gambar 2. Hasil Percobaan Menggerakan Motor Servo
Percobaan ini menunjukkan bahwa Arduino Uno mampu mengendalikan dua motor servo secara bersamaan dengan gerakan yang terkontrol. Konsep ini menjadi dasar penting dalam pengembangan robot yang memiliki gerakan leher atau kepala yang lebih ekspresif dan realistis.
Tutorial Menggerakkan Motor Servo sebagai Leher Robot Menggunakan Arduino Uno
Blynk merupakan sebuah platform aplikasi android yang diperuntukan untuk berbagai kontroler hardware seperti arduino, esp8266, raspberry dsb untuk mengendalikan,... selengkapnya
Pernahkah Anda melihat katalog busana muslimah ataupun lainnya, lalu ada objek orang yang sama dengan mengunakan baju berwarna tetapi... selengkapnya

Oke kali ini kita akan membahas salah satu board wifi yaitu kakak dari NodeMcu yang memiliki fungsi lebih +... selengkapnya
Di dalam dunia elektronika, dikenal dua jenis input dan output (I/O) yaitu, analog dan digital. Untuk yang digital itu gampang... selengkapnya
Bagi anda yang belum tau cara menggunakan LED pada NodeMCU, pada artikel ini akan di bahas cara-caranya. Sebelum melangkah... selengkapnya
Melanjutakan tutorial edisi telegram kali ini kita akan mendetekesi suhu meggunakan sensor Ds18b20 dan ESP01. Dalam tutorial ini kita... selengkapnya
Semangat pagi, kali ini kita akan belajar untuk mengontrol LED melalui wifi menggunakan NodeMCU. Mengapa LED? nggak langsung ke... selengkapnya
Sensor cahaya atau LDR (Light Dependent Resistor) adalah salah satu sensor analog yang paling sering digunakan saat belajar Arduino. Sensor... selengkapnya
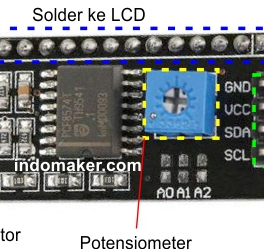
Penggunaan LCD I2C sering kali gagal menampilkan teks karena deklarasi awal yaitu alamat I2C yang salah/keliru dikarenakan alamat yang... selengkapnya

Hallo, kali ini akan membahas bagaimana cara untuk membuat dimmer menggunakan mosfet D4184 module. Mosfet mempunyai fungsi yaitu untuk... selengkapnya
Kabel Jumper Dupont Pelangi 10 cm female to female 1 lembar = 40 kabel
Rp 9.000
Features: Brand new and high quality. Control the speed of a DC motor with this controller. High efficiency, high torque,… selengkapnya
Rp 25.400
Case patern: Solid Warna : Merah dan Hijau Current: 10-20 mA Diameter: 3mm
Rp 300
Modul sensor tegangan AC bolak balik 1 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 21.000
Kabel Jumper Dupont Pelangi 30cm Male to Female 1 lembar = 40 kabel
Rp 13.500
Mini Solderless Breadboard 400 Tie Points adalah breadboard 400 titik lubang, dengan ukuran yang compact sangat cocok untuk anda yang… selengkapnya
Rp 7.800
Specifications: Operating voltage: DC3-5V Operating current: less than 20mA Sensor Type: Analog Detection Area: 40mmx16mm Production process: FR4 double-sided HASL… selengkapnya
Rp 3.000
Deskripsi Produk “LED Dot Matrix Display dengan 32×8 pixel, berwarna Merah, menggunakan IC MAX7219 sebagai driver dan dapat dikoneksikan ke… selengkapnya
Rp 47.500
Bosan dengan modul arduino yang kalian punya, saatnya mencoba modul programmer yang lain yah ini dia RASPBERRY PI 4 COMPUTER… selengkapnya
Rp 1.570.000
sg90 towerpro penggerak pada robot-robot kecil, dan bisa digunakan sebagai alat untuk hobi membuat robot dsb, dengan berat sekitar 9g… selengkapnya
Rp 15.500
Saat ini belum tersedia komentar.