
● online
- Max7219 Led Dot Matrix 32x8 Display Module For Ard....
- Dimmer SCR 2000W Motor Speed Controller 220V AC PW....
- Sensor Ultrasonik HC-SR04 HC SR04 Sensor Jarak Ult....
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to M....
- Dual Volt Amp Meter Digital Ampere Meter Voltmeter....
- Breadboard 400 titik lubang Bread board Projectboa....
- DS3231SN DS3231 SN I2C RTC Module & Baterai Mo....
- Power module DC DC 9A 300W Step Down Buck Converte....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Mengambil Data Sensor MPU6050 dengan Arduiono Uno
MPU6050 adalah Sensor Gyroscope dan Accelerometer yang memiliki 6-axis Motion Tracking di mana perangkat ini mengkombinasikan 3-axis gyroscope, 3-axis accelerometer dan sebuah DMP (Digital Motion Processor). MPU6050 mampu menerima input dari 3-axis compass untuk memberikan output Motion Fusion yang lengkap.
Dengan menggunakan modul ini, kita dapat membaca data gerakan dan orientasi secara real-time. Artikel ini akan membahas cara mengambil data dari sensor MPU6050 menggunakan Arduino Uno, mulai dari koneksi perangkat keras, instalasi library, hingga pembacaan data sensor melalui program sederhana.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan :
- MPU6050
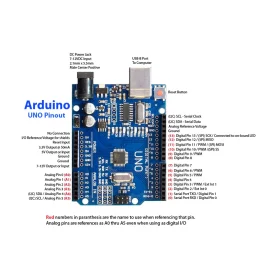
- Arduino Uno
- Breadboard dan kabel jumper
- Software:
- Arduino IDE
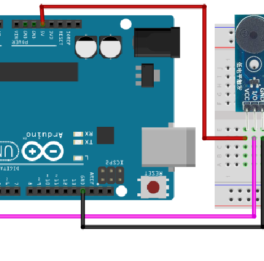
Wiring Rangkaian MPU6050
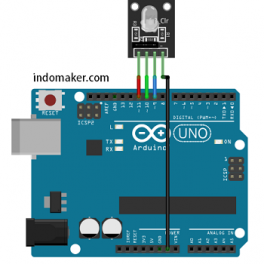
Susun rangkaian dengan panduan seperti ini:
- Pin VCC ke 5v
- Pin GND ke GND
- Pin SCL ke A5
- Pin SDA ke A4
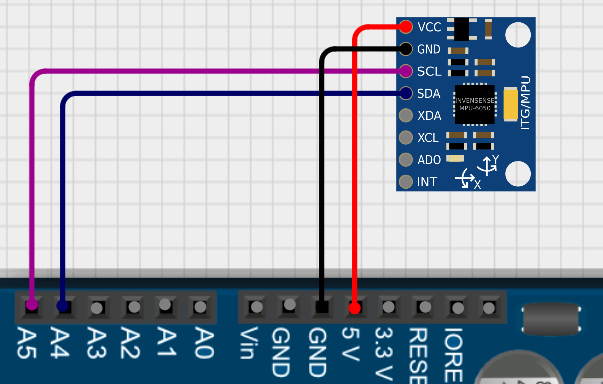
Gambar 1. Wiring Rangkaian MPU6050 dengan Arduino Uno
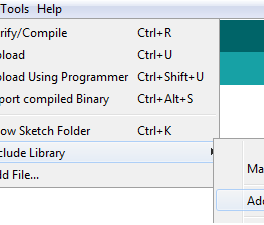
Instalasi Library MPU6050
Agar komunikasi antara Arduino dan sensor dapat dilakukan, kita memerlukan library khusus. Berikut langkah-langkahnya :
- Buka Arduino IDE.
- Masuk ke menu Sketch > Include Library > Manage Libraries
- Cari MPU6050 by Electronic Cats dan klik Install.
Menulis Program
Setelah semua komponen dan library terpasang, tulis kode berikut :
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050.h"
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
struct MyData {
byte X;
byte Y;
byte Z;
};
MyData data;
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
//pinMode(LED_BUILTIN, OUTPUT);
}
void loop()
{
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
data.X = map(ax, -17000, 17000, 0, 255 ); // X axis data
data.Y = map(ay, -17000, 17000, 0, 255);
data.Z = map(az, -17000, 17000, 0, 255); // Y axis data
delay(500);
Serial.print("Axis X = ");
Serial.print(data.X);
Serial.print(" ");
Serial.print("Axis Y = ");
Serial.print(data.Y);
Serial.print(" ");
Serial.print("Axis Z = ");
Serial.println(data.Z);
}
Penjelasan Kode
#include <MPU6050.h>: Menyertakan library untuk mengakses fungsi-fungsi sensor MPU6050.MPU6050 mpu;: Membuat objekmpuuntuk komunikasi antara Arduino dan sensor.mpu.initialize();: Menginisialisasi sensor agar siap membaca data.mpu.testConnection();: Mengecek apakah sensor berhasil terhubung ke Arduino.mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);: Membaca data akselerasi (ax, ay, az) dan gyroscope (gx, gy, gz) dari sensor.
Apa yang Akan Terjadi dengan MPU6050?
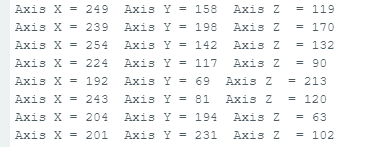
Gambar 2. Hasil Percobaan MPU6050 dengan Arduino Uno
Data yang ditampilkan merupakan hasil pembacaan nilai akselerasi (accelerometer) dari sensor MPU6050 pada tiga sumbu utama: X, Y, dan Z. Nilai-nilai tersebut menunjukkan seberapa besar percepatan yang terdeteksi oleh sensor pada masing-masing arah.
Contoh baris:
Tutorial Mengambil Data Sensor MPU6050 dengan Arduiono Uno

Raspberry Pi adalah komputer mini yang sangat populer di kalangan penggemar elektronika dan pemrograman. Salah satu kelebihan utamanya adalah pin... selengkapnya
Setelah kamu mengenal Arduino Uno dan isi dari Arduino Uno Trainer Kit, sekarang saatnya masuk ke bagian yang lebih teknis... selengkapnya
Mengapa disebut buzzer passive? karena sensor ini tidak mempunyai suara sendiri, melainkan buzzer ini perlu dikontrol dengan kontroler seperti... selengkapnya
Raspberry Pi tidak hanya bisa menyalakan LED atau membaca tombol, tapi juga bisa menghasilkan suara menggunakan komponen bernama buzzer. Buzzer... selengkapnya
Pada komponen tertentu dibutuhkan sebuah library agar komponen tersebut dapat berjalan sebagaimana mestinya. Apa itu library? library adalah sekumpulan... selengkapnya

Pasti Anda semua sudah tahukan apa itu pas foto. Bagi Anda yang belum tahu apa itu pas foto, pas... selengkapnya
Sensor Ultrasonik adalah sensor yang bekerja berdasarkan pantulan gelombang suara untuk mendeteksi keberadaan sebuah objek. Sensor ultrasonik terdapat dua bagian... selengkapnya
Melanjutakan tutorial edisi telegram kali ini kita akan mendetekesi suhu meggunakan sensor Ds18b20 dan ESP01. Dalam tutorial ini kita... selengkapnya
LED RGB adalah lampu led yang mempunyai 3 warna utama yaitu RED/merah, GREEN/hijau dan BLUE/biru. Namun dengan kombinasi dari... selengkapnya
Telegram? ya dengan fitur robot chat di telegram kita bisa mengontrol device dengan mudah dan praktis. Misal kita kelupaan... selengkapnya

Item Deskripsi : This module performance is stable, measure the distance accurately. performance nearly the same as SRF05, SRF02 SRF05,… selengkapnya
Rp 13.900
this is another great IIC/I2C/TWI/SPI Serial Interface. As the pin resources of for Arduino controller is limited, your project may… selengkapnya
Rp 12.400
Kabel Jumper Dupont Pelangi 10 cm male to male 1 lembar = 40 kabel
Rp 13.000
Buruan dibeli gan….barang murah-berkualitas SIAPA CEPAT DIA DAPAT Spesifikasi: LCD 1602 / 16×2 (16 karakter, 2 baris) merek QAPASS (cek… selengkapnya
Rp 24.500
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750
Kabel Jumper Dupont Pelangi 10 cm.. male to female 1 lembar isi 40 kabel
Rp 9.000
Putaran = 180º Specifications • Weight: 55 g • Dimension: 40.7 x 19.7 x 42.9 mm approx. • Stall torque:… selengkapnya
Rp 36.400
Dual Volt Amp Meter Digital Ampere Meter Voltmeter 10A 0-100V Ammeter Dilengkapi dengan pengukuran Voltmeter dan Amperemeter dalam 1 display… selengkapnya
Rp 26.500
Features: Brand new and high quality. Control the speed of a DC motor with this controller. High efficiency, high torque,… selengkapnya
Rp 25.400
TECHNICAL SPECIFICATIONS: – Broadcom BCM2711, Quad core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz – 2GB LPDDR4-2400 SDRAM – 2.4… selengkapnya
Rp 940.000
Saat ini belum tersedia komentar.