
● online
- 10X RESISTOR 1K 1KOHM 1/4W 1% METAL FILM....
- Relay Module 1 Channel Modul Relay 5V 10A 1 Channe....
- LCD CHARACTER 16X2 1602 5V GREEN HIJAU BACKLIGHT M....
- Kabel Jumper 20cm Dupont 20 cm Female to Female Pe....
- Resistor 220 Ohm 220R Ohm 220Ohm 1/4W 1% Metal fil....
- B0505S-1W 5V to 5V converter DC DC power module co....
- Kapton Tape Polymide Film 50mm Polimida 50 mm Isol....
- Kabel Jumper Dupont Pelangi 30 cm female to Female....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Mengitung Jarak dengan Pulsa Rotasi Disk Encorder dan Sensor Optocoupler ITR 9608
Optocoupler atau photo interrupter merupakan sensor optik slot tipe U yang menggunakan cahaya infra merah (IR) untuk mendeteksi ada atau tidaknya objek yang menghalangi jalur cahaya. Sensor ini memiliki dua bagian utama, yaitu:
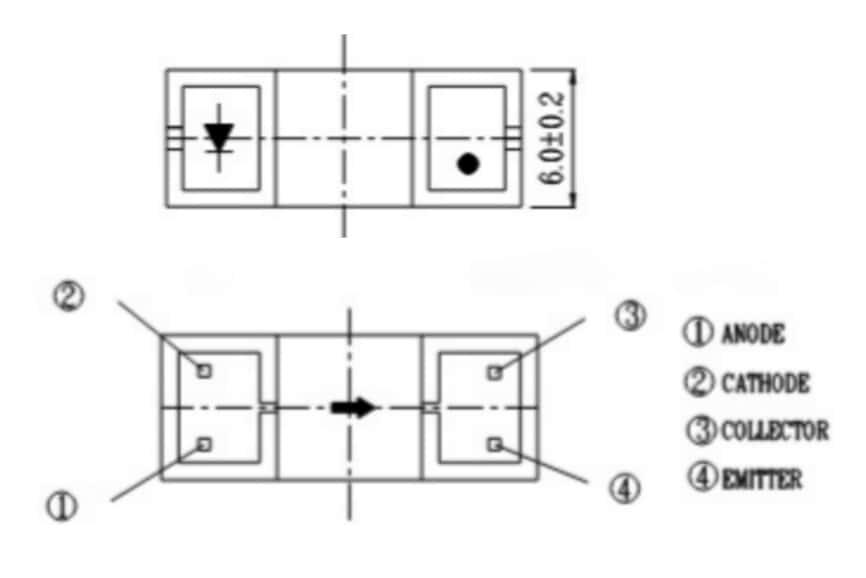
Gambar 1. Schematic Komponen Optocoupler
-
Pemancar
Bagian ini berupa LED infra merah yang berfungsi memancarkan sinar infra merah secara terus-menerus ke arah detektor. Cahaya ini tidak terlihat oleh mata manusia, tetapi dapat dideteksi oleh komponen Photodetector di sisi seberangnya. -
Penerima
Bagian penerima terdiri dari Phototransistor yang peka terhadap cahaya infra merah dari LED pemancar.
Ketika cahaya infra merah mengenai Phototransistor, maka transistor akan aktif dan menghasilkan sinyal pada output.
Sebaliknya, ketika sinar terhalang oleh objek seperti bagian gelap dari disk encoder, maka transistor akan nonaktif, dan output akan berubah ke kondisi logika berlawanan.
Kedua bagian ini dipasang berhadapan di dalam bentuk celah huruf “U”, sehingga sebuah benda seperti disk encoder bisa bergerak di antara keduanya dan memutus atau menghubungkan jalur cahaya infra merah. Dalam tutorial ini, kita akan membuat sistem sederhana yang menghitung jarak berdasarkan pulsa dari rotasi disk encoder, di mana 1 pulsa mewakili 1 mm pergerakan. Sistem ini sangat cocok untuk robot, mesin penghitung panjang kabel, konveyor, dan aplikasi otomasi lainnya.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan :
- Optocoupler ITR960
- Arduino nano
- Push button
- LED
- Resistor
- Breadboard dan kabel jumper
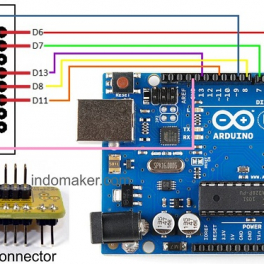
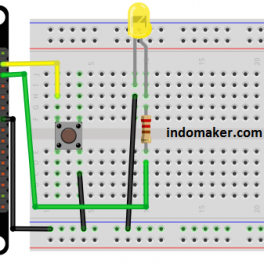
Wiring Rangkaian Optocoupler
Susun rangkaian dengan panduan seperti ini:
- Pin 5v ke positif Breadboard
- Pin GND ke negatif Breadboard
- Pin D2 ke emitter optocoupler
- Pin D3 ke positif button
- Pin D4 ke positif LED 2 melalui resistor
- Kaki anoda optocouplerke 5v melalui resistor
- Kaki katoda optocouplerke GND
- Kaki collector optocouplerke GND
- Kaki emitter optocouplerke 5v melalui resistor
- Kaki katoda LED 1 ke resistor emitter optocoupler
- Kaki anoda LED 2 ke 5v
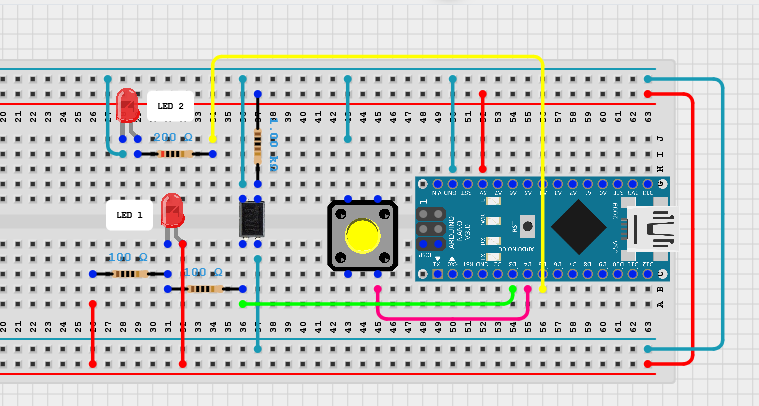
Gambar 2. Wiring Rangkaian Optocoupler dengan Arduino Nano
Menulis Program Data Optocoupler
Setelah semua komponen terpasang, buka software Arduino IDE dan tulis kode berikut :
/*
Penghitung Jarak berbasis Encoder
Versi: Arduino Nano
Encoder: 1 slot = 1 mm
*/
const byte sensorPin = 2; // Pin interrupt dari sensor encoder
const byte resetButtonPin = 3; // Tombol reset
const byte ledPin = 4; // LED indikator
// Spesifikasi encoder
const unsigned int slotsPerRevolution = 88; // jumlah slot per putaran
// Masukkan perkiraan RPM maksimum alatmu di sini
const unsigned int maxRPM = 600; // ubah sesuai kebutuhan (contoh: 600, 3000, dst)
volatile unsigned long pulseCount = 0;
volatile unsigned long lastPulseTime = 0; // untuk debounce di ISR
unsigned long debounceMicros = 500; // dihitung otomatis di setup()
const unsigned long minDebounceMicros = 50; // batas bawah praktis (μs)
// ISR (Interrupt Service Routine) — menghitung pulsa dari encoder
void handleSensorPulse() {
unsigned long now = micros();
if (now - lastPulseTime > debounceMicros) {
pulseCount++;
lastPulseTime = now;
}
}
void setup() {
Serial.begin(115200);
Serial.println("=== Encoder Distance Counter (Arduino Nano) ===");
pinMode(sensorPin, INPUT_PULLUP);
pinMode(resetButtonPin, INPUT_PULLUP);
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, LOW);
// Hitung debounceMicros berdasarkan maxRPM & slots
float pulsesPerSec = ((float)maxRPM / 60.0) * (float)slotsPerRevolution;
if (pulsesPerSec <= 0.0001) pulsesPerSec = 1.0; // safety
float tMin_us = 1000000.0 / pulsesPerSec; // mikrodetik antar pulsa
unsigned long computed = (unsigned long)(tMin_us * 0.35f); // 35% dari interval
if (computed < minDebounceMicros) computed = minDebounceMicros;
debounceMicros = computed;
// Info ke Serial
Serial.print("Slots per Revolution: ");
Serial.println(slotsPerRevolution);
Serial.print("Max RPM: ");
Serial.println(maxRPM);
Serial.print("Estimated min interval (us): ");
Serial.println((unsigned long)tMin_us);
Serial.print("Debounce interval (us): ");
Serial.println(debounceMicros);
if (tMin_us * 0.35f < minDebounceMicros) {
Serial.println("⚠️ WARNING: maxRPM terlalu tinggi, bisa kehilangan pulsa!");
}
// Gunakan interrupt 0 (pin D2 di Nano)
attachInterrupt(digitalPinToInterrupt(sensorPin), handleSensorPulse, RISING);
Serial.println(">> Encoder siap: 1 slot = 1 mm\n");
}
void loop() {
// Tombol reset ditekan (aktif LOW)
if (digitalRead(resetButtonPin) == LOW) {
noInterrupts();
pulseCount = 0;
interrupts();
digitalWrite(ledPin, HIGH);
Serial.println(">> Penghitung di-reset ke 0 mm");
delay(300); // debounce tombol
digitalWrite(ledPin, LOW);
}
// Ambil data dari variabel volatile
noInterrupts();
unsigned long pulseCopy = pulseCount;
interrupts();
// Hitung jarak (1 pulsa = 1 mm)
unsigned long jarakMM = pulseCopy;
Serial.print("Jarak Terdeteksi: ");
Serial.print(jarakMM);
Serial.println(" mm");
delay(100); // Update tiap 100 ms
}
Penjelasan Kode
slotsPerRevolution: jumlah lubang pada disk encoder.maxRPM: kecepatan maksimum perkiraan putaran disk (digunakan untuk menentukan waktu antar pulsa).pulseCount: jumlah total pulsa (setiap 1 pulsa = 1 mm).lastPulseTime: waktu mikrodetik dari pulsa terakhir untuk menghitung jeda antar pulsa (debounce).
Apa yang Akan Terjadi dengan Optocoupler?
Ketika disk encorder diputar secara perlahan maka sensor akan mendeteksi tiap pulsa nya sebagaia 1mm yang akan ditampilkan pada serial monitor secara berurutan tanpa adanya lonjakan yang tidak wajar, hal ini menunjukkan bahwa mekanisme debounce waktu mikrodetik (micros) pada ISR bekerja efektif untuk menyaring pulsa ganda akibat noise optik dari sensor. Saat tombol reset ditekan, LED indikator menyala sesaat dan penghitung kembali ke nol.
Tutorial Mengitung Jarak dengan Pulsa Rotasi Disk Encorder dan Sensor Optocoupler ITR 9608
Panel P10 LED Matrix merupakan sebuah display berisi kumpulan led-led yang disusun secara matrix. Fungsinya untuk menampilkan informasi berupa... selengkapnya
Kalau kamu baru mulai belajar Arduino, percobaan pertama yang paling wajib dicoba adalah menyalakan LED. Percobaan ini kelihatannya simpel, tapi... selengkapnya
Hallo semua, pada artikel kali saya ini akan membahas kembali seputar push button switch dimana pada artikel yang sebelumnya... selengkapnya
Bagi orang-orang yang sering melihat konten-konten di aplikasi Instagram mungkin sudah tidak asing lagi, melihat gambar atau foto yang... selengkapnya
Setelah kemarin sudah belajar Blynk dan sensor LDR DISINI, sekarang lanjut ke sensor berikutnya yaitu sensor DHT11 untuk memonitoring... selengkapnya
Mari kita belajar lagi, kali ini membahas sensor LDR. Dimana sensor ini nilainya akan berubah menyesuaikan cahaya yang diterima... selengkapnya
Motor merupakan salah satu komponen paling penting dalam dunia robotika karena memungkinkan sebuah sistem untuk bergerak secara fisik. Dengan motor,... selengkapnya
Potensiometer adalah salah satu jenis resistor yang nilai resistansinya dapat diatur sesuai dengan kebutuhan rangkaian elektronika ataupun kebutuhan pemakainya.... selengkapnya
Bagi anda yang belum tau cara menggunakan LED pada NodeMCU, pada artikel ini akan di bahas cara-caranya. Sebelum melangkah... selengkapnya
Melihat potensi dari android itu sendiri, akhirnya banyak orang yang berlomba lomba belajar memperdalam sistem operasi ini. Tentunya akan... selengkapnya

Modul sensor tegangan AC bolak balik 3 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 57.000
Item Deskripsi : This module performance is stable, measure the distance accurately. performance nearly the same as SRF05, SRF02 SRF05,… selengkapnya
Rp 13.900
TILT SENSOR adalah sensor untuk mendeteksi sudut kemiringan / derajat, dimana cara kerja sensor ini adalah dengan menggunakan 2 buah… selengkapnya
Rp 9.800
Fitur: -Dapat mendeteksi api atau panjang gelombang sumber cahaya dalam 760nm ~ 1100nm – Api lebih ringan mendeteksi jarak 80cm… selengkapnya
Rp 9.000
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750
Compatibility: USB v2.0 standard Interface: Network: USB Series: RS-485 Port: an independent RS-485 Connector: Network: USB type A connector Series:… selengkapnya
Rp 38.800
Dimmer AC 220 Volt 4000 Watt + Casing Aluminium Potensiometer untuk mengatur tegangan output min/max pada tegangan AC PLN 220V…. selengkapnya
Rp 52.500
Kabel jumper Dupont untuk jumper Arduino atau Raspberry Pi 20 cm Male to Male 1 lembar = 40 kabel
Rp 11.300
Features: It is of high power density, high efficiency, high-reliability, small size and lightweight. It can isolate unsteady single-way voltage… selengkapnya
Rp 18.500
Dual Volt Amp Meter Digital Ampere Meter Voltmeter 10A 0-100V Ammeter Dilengkapi dengan pengukuran Voltmeter dan Amperemeter dalam 1 display… selengkapnya
Rp 26.500
Saat ini belum tersedia komentar.