
● online
- Raspberry Pi 4 Model B 4GB Original UK E14 Raspi 4....
- Raspberry Pi 4 Model B 8GB Original UK E14 Raspi 4....
- Potensiometer 10K - Mono Potensio Meter Linear Res....
- Modul Sensor Tegangan AC Bolak balik 220V Listrik ....
- 5V 700mA (3.5W) Isolated switch Power Supply Modul....
- ESR Meter Digital LCR-T4 Tester Transistor Diode M....
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang....
- Push Button Tactile Switch Saklar Tombol Tinggi - ....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Menggerakan Motor Servo sebagai Leher Robot dengan Raspberry Pi
Pada robot elektronik sering kali digunakan motor servo sebagai leher yang bisa bergerak, motor servo adalah perangkat elektromekanis yang dirancang menggunakan sistem kontrol jenis loop tertutup (servo) sebagai penggerak dalam sebuah rangkaian yang menghasilkan torsi dan kecepatan yang berdasarkan arus listrik dan tegangan yang ada.
Sederhananya motor servo ini perangkat listrik mandiri yang dapat mendorong, memutar objek dengan presisi tinggi. Jika ingin memutar suatu objek pada beberapa sudut atau jarak tertentu, maka bisa menggunakan motor servo. Dalam proyek kali ini, kita akan belajar cara menggerakkan motor servo untuk mensimulasikan gerakan leher robot, menggunakan Raspberry Pi.
Dengan memanfaatkan sinyal PWM dari GPIO Raspberry Pi, kita bisa mengatur posisi sudut motor servo secara presisi. Proyek ini cocok sebagai dasar untuk membuat robot yang bisa mengangguk, menoleh, atau bahkan mengekspresikan emosi lewat gerakan leher.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan:
- Raspberry Pi Trainer Kit v2
- Motor Servo
- Breadboard dan kabel jumper
- Software:
- MobaXterm (untuk remote terminal)
- Notepad++ (untuk menulis skrip Python)
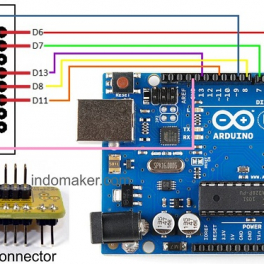
Wiring Rangkaian Motor Servo
Susun rangkaian dengan panduan seperti ini:
- Pin merah ke VCC 5v
- Pin cokelat ke GND
- Pin jingga ke GPIO 13 dan 25

Gambar 1. Wiring Rangkaian Motor Servo dan Raspberry Pi
Menulis Program Menggerakkan Motor Servo
Setelah semua komponen terpasang, buka Notepad++ dan buat file Python baru. Tulis kode berikut dan simpan file dengan nama servo.py :
import time
from gpiozero import Servo
from time import sleep
servo_angguk_pin = 25
servo_geleng_pin = 13
TITIK_NOL_ANGGUK = 0.95
rentang_angguk = 0.3
rentang_geleng = 1.0 # Nilai ini membuat gerakan menggeleng menjadi lebih luas
servo_angguk = Servo(servo_angguk_pin, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
servo_geleng = Servo(servo_geleng_pin, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
def gerak_halus(servo, posisi_mulai, posisi_akhir, durasi):
langkah_halus = 200
selisih_posisi = posisi_akhir - posisi_mulai
jeda_waktu = durasi / langkah_halus
for i in range(langkah_halus + 1):
posisi_saat_ini = posisi_mulai + (i / langkah_halus) * selisih_posisi
posisi_saat_ini = max(-1.0, min(1.0, posisi_saat_ini))
servo.value = posisi_saat_ini
sleep(jeda_waktu)
try:
print("Mengatur kedua servo ke posisi awal...")
servo_angguk.value = TITIK_NOL_ANGGUK
servo_geleng.value = 0.0
sleep(1)
print("Memulai gerakan mengangguk dan menggeleng...")
while True:
posisi_depan = TITIK_NOL_ANGGUK - rentang_angguk
gerak_halus(servo_angguk, TITIK_NOL_ANGGUK, posisi_depan, 2.0)
gerak_halus(servo_angguk, posisi_depan, TITIK_NOL_ANGGUK, 2.0)
posisi_kanan = rentang_geleng # Menggunakan nilai 1.0
posisi_kiri = -rentang_geleng # Menggunakan nilai -1.0
gerak_halus(servo_geleng, 0.0, posisi_kanan, 1.5)
gerak_halus(servo_geleng, posisi_kanan, posisi_kiri, 3.0)
gerak_halus(servo_geleng, posisi_kiri, 0.0, 1.5)
except KeyboardInterrupt:
print("Program dihentikan.")
servo_angguk.close()
servo_geleng.close()
Penjelasan Kode
import timedanfrom gpiozero import Servo: Mengimpor library untuk kontrol waktu dan servo.servo_angguk_pin =: Menentukan pin GPIO untuk masing-masing servo.TITIK_NOL_ANGGUK = 0.95: Titik netral untuk servo angguk.rentang_angguk = 0.3: Rentang gerak servo anggukrentang_geleng = 1.0: Rentang maksimum servo geleng.Servo(..., min_pulse_width=..., max_pulse_width=...): Mengatur lebar pulsa PWM agar kompatibel dengan jenis servo.gerak_halus(): Fungsi untuk menggerakkan servo secara halus dengan interpolasi 200 langkah kecil.servo_angguk.value = TITIK_NOL_ANGGUK: Mengatur servo angguk ke posisi awal.servo_geleng.value = 0.0: Mengatur servo geleng ke posisi tengah.while True: Program berjalan terus-menerus hingga dihentikan.except KeyboardInterrupt: Program berhenti dengan aman saat ditekan Ctrl+C.servo.close(): Menutup koneksi servo saat program dihentikan.
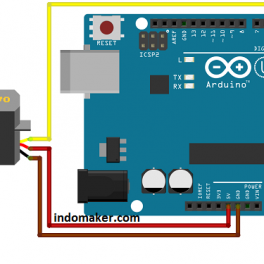
Apa yang Akan Terjadi dengan Motor Servo?
 Gambar 2. Hasil Percobaan Rangkaian Motor Servo dan Raspberry Pi Trainer Kit
Gambar 2. Hasil Percobaan Rangkaian Motor Servo dan Raspberry Pi Trainer Kit
Saat program dijalankan, Raspberry Pi akan menggerakkan dua buah servo yang berperan sebagai leher robot. Servo pertama akan mengangguk perlahan, meniru gerakan kepala menunduk dan kembali tegak. Setelah itu, servo kedua akan menggeleng perlahan dari kanan ke kiri, lalu kembali ke tengah. Seluruh gerakan dibagi ke dalam banyak langkah kecil, Gerakan ini akan berlangsung terus-menerus selama program berjalan.
Tutorial Menggerakan Motor Servo sebagai Leher Robot dengan Raspberry Pi
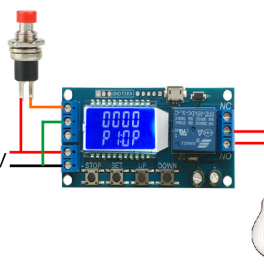
Semangat pagi, salam hangat dari saya untuk semua pengunjung indomaker.com. Kali ini kita akan belajar mengenai penggunaan timer relay... selengkapnya
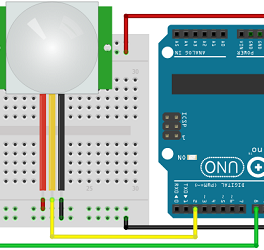
Sensor PIR berfungsi untuk mendeteksi benda (manusia/hewan) dengan cara mendeteksi energi panas dalam bentuk radiasi inframerah. Jadi sensor ini... selengkapnya
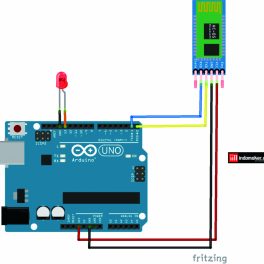
Modul Bluetooth DX-BT18 adalah perangkat elektronika yang digunakan untuk menghubungkan suatu perangkat menggunakan koneksi bluetooth. Saat ini penggunaan sensor sidik... selengkapnya

Sedikit kembali ke awal pembelajaran, pembahasan kali ini diperuntukan untuk anda yang masih bingung untuk belajar Arduino dari mana.... selengkapnya
Seperti yang kita ketahui, Raspberry Pi merupakan komputer mini yang powerful karena dengan ukurannya yang kecil tetapi bisa berfungsi layaknya... selengkapnya
Panel P10 LED Matrix merupakan sebuah display berisi kumpulan led-led yang disusun secara matrix. Fungsinya untuk menampilkan informasi berupa... selengkapnya
NodeMCU dikhususkan sebagai board yang dapat terhubung dengan jaringan internet (Wifi), jadi buat yang ingin belajar Internet of... selengkapnya
Melihat potensi dari android itu sendiri, akhirnya banyak orang yang berlomba lomba belajar memperdalam sistem operasi ini. Tentunya akan... selengkapnya
Pernahkah Anda melihat suatu objek foto diatas air, lalu di atas air ada pantulan dari objek foto tersebut, nah... selengkapnya
Pada artikel sebelumnya kita sudah belajar untuk mendaftar ke thingspeak, jika belum silahkan bisa di lihat DISINI. Oke sip... selengkapnya
Penurun tegangan DC-DC ekonomis yang bisa distel tegangan output nya. Cocok untuk pemasangan variasi mobil dan sepeda motor, dijadikan charger… selengkapnya
Rp 9.000
The power supply is isolated industrial power modules, with a temperature protection, overcurrent and short circuit full protection, high and… selengkapnya
Rp 15.900
Kinerja Produk: Warnanya coklat (amber), Goldfinger tape sticky baik, patuh, suhu tinggi, pelarut, tidak ada rembesan timah dan tidak ada… selengkapnya
Rp 11.900
Kabel Jumper Dupont Pelangi 30cm Male to Female 1 lembar = 40 kabel
Rp 13.500
Kabel Jumper Dupont Pelangi 10 cm male to male 1 lembar = 40 kabel
Rp 13.000
2000W SCR Electronic Voltage Regulator Speed Controller Dimmer Thermostat Aplikasi : Kontrol temperature heater, kontrol kecepatan fan/bor tangan/gurinda tangan, kompor… selengkapnya
Rp 19.500
Kabel Jumper Dupont Pelangi 30cm female to Female 1 lembar = 40 kabel
Rp 13.500
Fitur: -Dapat mendeteksi api atau panjang gelombang sumber cahaya dalam 760nm ~ 1100nm – Api lebih ringan mendeteksi jarak 80cm… selengkapnya
Rp 9.000
Bagaimana jika mikrokontroler yang anda gunakan tidak memiliki port ADC. atau anda masih kurang dengan spesifikasi resolusi ADC yang disediakan… selengkapnya
Rp 65.000
Kabel jumper 20 cm merk Dupont untuk Arduino Female to male 1 lembar = 40 kabel
Rp 11.300
Saat ini belum tersedia komentar.