
● online
- Kabel Jumper 20cm Dupont 20 cm Male to Male Pelang....
- LM2596 Module Step Down DC-DC Ultra compact in 3-4....
- PWM DC 10A Motor 12V-40V Pulse Width Modulation Sp....
- Raspberry Pi 4 Model B - 2GB RAM Raspberry Pi 4B....
- ESP32 ESP-32 Wireless Module ESP32-S ESP-WROOM-32 ....
- Max7219 Led Dot Matrix 32x8 Display Module For Ard....
- Raspberry Pi 4 Model B 8GB Original UK E14 Raspi 4....
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to F....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Menggerakan Motor Servo sebagai Leher Robot dengan Raspberry Pi
Pada robot elektronik sering kali digunakan motor servo sebagai leher yang bisa bergerak, motor servo adalah perangkat elektromekanis yang dirancang menggunakan sistem kontrol jenis loop tertutup (servo) sebagai penggerak dalam sebuah rangkaian yang menghasilkan torsi dan kecepatan yang berdasarkan arus listrik dan tegangan yang ada.
Sederhananya motor servo ini perangkat listrik mandiri yang dapat mendorong, memutar objek dengan presisi tinggi. Jika ingin memutar suatu objek pada beberapa sudut atau jarak tertentu, maka bisa menggunakan motor servo. Dalam proyek kali ini, kita akan belajar cara menggerakkan motor servo untuk mensimulasikan gerakan leher robot, menggunakan Raspberry Pi.
Dengan memanfaatkan sinyal PWM dari GPIO Raspberry Pi, kita bisa mengatur posisi sudut motor servo secara presisi. Proyek ini cocok sebagai dasar untuk membuat robot yang bisa mengangguk, menoleh, atau bahkan mengekspresikan emosi lewat gerakan leher.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan:
- Raspberry Pi Trainer Kit v2
- Motor Servo
- Breadboard dan kabel jumper
- Software:
- MobaXterm (untuk remote terminal)
- Notepad++ (untuk menulis skrip Python)
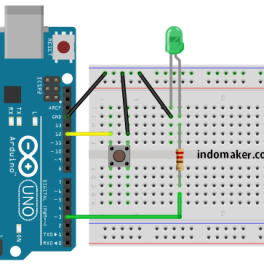
Wiring Rangkaian Motor Servo
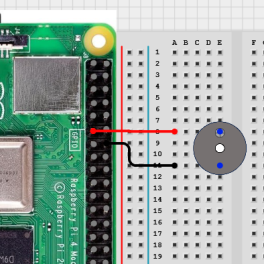
Susun rangkaian dengan panduan seperti ini:
- Pin merah ke VCC 5v
- Pin cokelat ke GND
- Pin jingga ke GPIO 13 dan 25

Gambar 1. Wiring Rangkaian Motor Servo dan Raspberry Pi
Menulis Program Menggerakkan Motor Servo
Setelah semua komponen terpasang, buka Notepad++ dan buat file Python baru. Tulis kode berikut dan simpan file dengan nama servo.py :
import time
from gpiozero import Servo
from time import sleep
servo_angguk_pin = 25
servo_geleng_pin = 13
TITIK_NOL_ANGGUK = 0.95
rentang_angguk = 0.3
rentang_geleng = 1.0 # Nilai ini membuat gerakan menggeleng menjadi lebih luas
servo_angguk = Servo(servo_angguk_pin, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
servo_geleng = Servo(servo_geleng_pin, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
def gerak_halus(servo, posisi_mulai, posisi_akhir, durasi):
langkah_halus = 200
selisih_posisi = posisi_akhir - posisi_mulai
jeda_waktu = durasi / langkah_halus
for i in range(langkah_halus + 1):
posisi_saat_ini = posisi_mulai + (i / langkah_halus) * selisih_posisi
posisi_saat_ini = max(-1.0, min(1.0, posisi_saat_ini))
servo.value = posisi_saat_ini
sleep(jeda_waktu)
try:
print("Mengatur kedua servo ke posisi awal...")
servo_angguk.value = TITIK_NOL_ANGGUK
servo_geleng.value = 0.0
sleep(1)
print("Memulai gerakan mengangguk dan menggeleng...")
while True:
posisi_depan = TITIK_NOL_ANGGUK - rentang_angguk
gerak_halus(servo_angguk, TITIK_NOL_ANGGUK, posisi_depan, 2.0)
gerak_halus(servo_angguk, posisi_depan, TITIK_NOL_ANGGUK, 2.0)
posisi_kanan = rentang_geleng # Menggunakan nilai 1.0
posisi_kiri = -rentang_geleng # Menggunakan nilai -1.0
gerak_halus(servo_geleng, 0.0, posisi_kanan, 1.5)
gerak_halus(servo_geleng, posisi_kanan, posisi_kiri, 3.0)
gerak_halus(servo_geleng, posisi_kiri, 0.0, 1.5)
except KeyboardInterrupt:
print("Program dihentikan.")
servo_angguk.close()
servo_geleng.close()
Penjelasan Kode
import timedanfrom gpiozero import Servo: Mengimpor library untuk kontrol waktu dan servo.servo_angguk_pin =: Menentukan pin GPIO untuk masing-masing servo.TITIK_NOL_ANGGUK = 0.95: Titik netral untuk servo angguk.rentang_angguk = 0.3: Rentang gerak servo anggukrentang_geleng = 1.0: Rentang maksimum servo geleng.Servo(..., min_pulse_width=..., max_pulse_width=...): Mengatur lebar pulsa PWM agar kompatibel dengan jenis servo.gerak_halus(): Fungsi untuk menggerakkan servo secara halus dengan interpolasi 200 langkah kecil.servo_angguk.value = TITIK_NOL_ANGGUK: Mengatur servo angguk ke posisi awal.servo_geleng.value = 0.0: Mengatur servo geleng ke posisi tengah.while True: Program berjalan terus-menerus hingga dihentikan.except KeyboardInterrupt: Program berhenti dengan aman saat ditekan Ctrl+C.servo.close(): Menutup koneksi servo saat program dihentikan.
Apa yang Akan Terjadi dengan Motor Servo?
 Gambar 2. Hasil Percobaan Rangkaian Motor Servo dan Raspberry Pi Trainer Kit
Gambar 2. Hasil Percobaan Rangkaian Motor Servo dan Raspberry Pi Trainer Kit
Saat program dijalankan, Raspberry Pi akan menggerakkan dua buah servo yang berperan sebagai leher robot. Servo pertama akan mengangguk perlahan, meniru gerakan kepala menunduk dan kembali tegak. Setelah itu, servo kedua akan menggeleng perlahan dari kanan ke kiri, lalu kembali ke tengah. Seluruh gerakan dibagi ke dalam banyak langkah kecil, Gerakan ini akan berlangsung terus-menerus selama program berjalan.
Tutorial Menggerakan Motor Servo sebagai Leher Robot dengan Raspberry Pi
Raspberry Pi tidak hanya bisa menyalakan LED atau membaca tombol, tapi juga bisa menghasilkan suara menggunakan komponen bernama buzzer. Buzzer... selengkapnya
Telegram? ya dengan fitur robot chat di telegram kita bisa mengontrol device dengan mudah dan praktis. Misal kita kelupaan... selengkapnya
Pada komponen tertentu dibutuhkan sebuah library agar komponen tersebut dapat berjalan sebagaimana mestinya. Apa itu library? library adalah sekumpulan... selengkapnya

Sensor getar Piezoelektrik adalah komponen yang fantastis untuk mendeteksi benturan, getaran, atau bahkan suara. Namun berbeda dengan modul piezo 3... selengkapnya

Sensor suhu lagi? Gpp ya disini kita belajar semua sensor suhu, nah tinggal sensor mana nih yang akan digunakan,... selengkapnya

Hallo semuanya, kali ini saya akan mendemonstrasikan penggunaan RFID RC522 untuk membaca e-KTP maupun e-Toll. Pada postingan sebelumnya sudah... selengkapnya
Push button switch merupakan sebuah saklar dimana komponen ini berfungsi untuk mengubungkan atau memutus arus listrik. Saklar jenis ini... selengkapnya

Sensor suara merupakan sensor yang dapat mengubah besaran suara menjadi besaran listrik dimana nilai diperoleh dari besarnya gelombang suara... selengkapnya
Sensor getar Piezoelectric Ceramic (Piezo) merupakan sensor getaran sederhana namun sangat sensitif yang mampu menghasilkan tegangan saat terjadi tekanan atau... selengkapnya
Sensor LM35 merupakan sebuah sensor yang dapat mendeteksi suhu ruangan dengan cara mengubah besaran suhu menjadi besaran listrik dalam... selengkapnya

Kinerja Produk: Warnanya coklat (amber), Goldfinger tape sticky baik, patuh, suhu tinggi, pelarut, tidak ada rembesan timah dan tidak ada… selengkapnya
Rp 11.900
Kabel Jumper Dupont Pelangi 10 cm male to male 1 lembar = 40 kabel
Rp 13.000
Bosan dengan modul arduino yang kalian punya, saatnya mencoba modul programmer yang lain yah ini dia RASPBERRY PI 4 COMPUTER… selengkapnya
Rp 1.570.000
Penurun tegangan DC-DC ekonomis yang bisa distel tegangan output nya. Cocok untuk pemasangan variasi mobil dan sepeda motor, dijadikan charger… selengkapnya
Rp 9.000
This is a set of transmitter and receiver in one of the photoelectric sensor. Detection distance can be adjusted according… selengkapnya
Rp 37.500
Kabel jumper Dupont untuk jumper Arduino atau Raspeberry Pi 20 cm Female to female 1 lembar = 40 kabel
Rp 11.300
Modul sensor tegangan AC bolak balik 1 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 21.000
Spesifikasi : – 16×2 – Warna Biru – Tegangan kerja : 5v – Sudah include module I2C Backpack dan tersolder… selengkapnya
Rp 30.000
Features – Calibrated directly in Celsius (Centigrade) – Linear + 10.0 mV/C scale factor – 0.5C accuracy guaranteeable (at +25C)… selengkapnya
Rp 8.000
Saat ini belum tersedia komentar.