
● online
- Push Button Tactile Switch Saklar Tombol Tinggi - ....
- Kabel Jumper 20cm Dupont 20 cm Female to Female Pe....
- Raspberry Pi 4 Model B 4GB Original UK E14 Raspi 4....
- Motor servo MG996R TowerPro Metal Gear....
- Kabel Jumper Arduino Dupont 20 cm Female to Male P....
- SG90 Motor Servo For Arduino Uno Mega SG 90 Biru S....
- Kabel Jumper arduino Dupont Pelangi 30 cm Male to ....
- RC Servo ARM Horn M3 Metal 25T MG995 MG946R MG996R....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Mengendalikan Motor DC Menggunakan Arduino Uno dan Motor Driver MX1508
Motor merupakan salah satu komponen paling penting dalam dunia robotika karena memungkinkan sebuah sistem untuk bergerak secara fisik. Dengan motor, kamu bisa membuat berbagai proyek menarik seperti mobil robot, conveyor mini, hingga mekanisme otomatis lainnya. Namun, motor tidak bisa langsung dikendalikan dari pin Arduino Uno.
Alasannya sederhana: motor membutuhkan arus dan daya yang jauh lebih besar dibandingkan kemampuan pin digital Arduino. Selain itu, motor juga bisa menghasilkan tegangan balik saat berhenti atau berubah arah secara tiba-tiba, yang berisiko merusak Arduino. Karena itulah dibutuhkan motor driver sebagai perantara agar motor bisa dikendalikan dengan aman.
Pada percobaan ini, kamu akan belajar cara mengendalikan empat motor DC menggunakan Arduino Uno dan motor driver MX1508. Sebelum digunakan untuk sistem robot, setiap motor akan diuji untuk memastikan arah putaran dan koneksi sudah benar.
Cara Kerja Sistem Kendali Motor
Arduino mengirimkan sinyal logika ke pin input motor driver. Ketika satu pin bernilai HIGH dan pasangannya bernilai LOW, motor akan berputar ke satu arah. Jika kombinasi logika dibalik, motor akan berputar ke arah sebaliknya. Ketika kedua pin bernilai LOW, motor akan berhenti.
Dengan mengatur beberapa motor secara bersamaan, Arduino dapat mengontrol pergerakan mobil robot, seperti maju, berhenti, dan mundur.
Alat dan Bahan yang Diperlukan
Untuk menjalankan percobaan ini, siapkan komponen berikut:
- Arduino Uno Trainer Kit
- Motor driver MX1508
- Motor DC
- Baterai sebagai sumber daya motor
- Roda atau ban mobil mainan
- Kabel jumper
- Software Arduino IDE
Wiring Rangkaian Motor Driver
Sebelum menulis program, susun terlebih dahulu rangkaian motor driver dengan Arduino Uno.
- Motor driver dihubungkan ke sumber daya motor melalui pin positif dan ground.
- Setiap motor DC dihubungkan ke keluaran motor driver.
Pin kendali motor driver dihubungkan ke pin digital Arduino sebagai berikut:
Motor Driver 1
- IN1 ke pin D13 Arduino
- IN2 ke pin D12 Arduino
- IN3 ke pin D11 Arduino
- IN4 ke pin D10 Arduino
Motor Driver 2
- IN1 ke pin D9 Arduino
- IN2 ke pin D8 Arduino
- IN3 ke pin D7 Arduino
- IN4 ke pin D6 Arduino
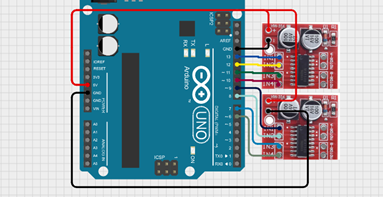
Gambar 1. Wiring Rangkaian Menggerakan Motor Driver
Setiap pasangan pin IN digunakan untuk mengatur satu motor, dengan kombinasi logika tertentu untuk menentukan arah putaran.
Menulis Program Menggerakkan Motor DC
Setelah rangkaian terpasang dengan benar, buka Arduino IDE, lalu tuliskan program berikut dan unggah ke papan Arduino Uno.
// ===== DRIVER 1 =====
#define D1_IN1 13
#define D1_IN2 12
#define D1_IN3 11
#define D1_IN4 10
// ===== DRIVER 2 =====
#define D2_IN1 9
#define D2_IN2 8
#define D2_IN3 7
#define D2_IN4 6
void setup() {
pinMode(D1_IN1, OUTPUT);
pinMode(D1_IN2, OUTPUT);
pinMode(D1_IN3, OUTPUT);
pinMode(D1_IN4, OUTPUT);
pinMode(D2_IN1, OUTPUT);
pinMode(D2_IN2, OUTPUT);
pinMode(D2_IN3, OUTPUT);
pinMode(D2_IN4, OUTPUT);
Serial.begin(9600);
Serial.println("2 Motor Driver MX1508 siap digunakan");
}
void loop() {
Serial.println("SEMUA MOTOR MAJU");
semuaMotorMaju();
delay(2000);
Serial.println("SEMUA MOTOR STOP");
stopSemuaMotor();
delay(1000);
Serial.println("SEMUA MOTOR MUNDUR");
semuaMotorMundur();
delay(2000);
Serial.println("SEMUA MOTOR STOP");
stopSemuaMotor();
delay(2000);
}
// ===== FUNGSI =====
void semuaMotorMaju() {
digitalWrite(D1_IN1, LOW);
digitalWrite(D1_IN2, HIGH);
digitalWrite(D1_IN3, LOW);
digitalWrite(D1_IN4, HIGH);
digitalWrite(D2_IN1, LOW);
digitalWrite(D2_IN2, HIGH);
digitalWrite(D2_IN3, HIGH);
digitalWrite(D2_IN4, LOW);
}
void semuaMotorMundur() {
digitalWrite(D1_IN1, HIGH);
digitalWrite(D1_IN2, LOW);
digitalWrite(D1_IN3, HIGH);
digitalWrite(D1_IN4, LOW);
digitalWrite(D2_IN1, HIGH);
digitalWrite(D2_IN2, LOW);
digitalWrite(D2_IN3, LOW);
digitalWrite(D2_IN4, HIGH);
}
void stopSemuaMotor() {
digitalWrite(D1_IN1, LOW);
digitalWrite(D1_IN2, LOW);
digitalWrite(D1_IN3, LOW);
digitalWrite(D1_IN4, LOW);
digitalWrite(D2_IN1, LOW);
digitalWrite(D2_IN2, LOW);
digitalWrite(D2_IN3, LOW);
digitalWrite(D2_IN4, LOW);
}
Penjelasan Kode
- #define D1_IN1 13 hingga #define D1_IN4 10 digunakan untuk mendefinisikan pin kendali motor driver pertama agar mudah dipanggil dalam program
- #define D2_IN1 9 hingga #define D2_IN4 6 digunakan untuk mendefinisikan pin kendali motor driver kedua, dengan penyesuaian arah pada salah satu channel
- pinMode(…, OUTPUT); digunakan untuk mengatur seluruh pin yang terhubung ke motor driver sebagai keluaran
- semuaMotorMaju(); digunakan untuk menjalankan seluruh motor ke arah maju dengan kombinasi logika yang sesuai
- semuaMotorMundur(); digunakan untuk menjalankan seluruh motor ke arah mundur dengan kombinasi logika kebalikan dari arah maju
- stopSemuaMotor(); digunakan untuk menghentikan seluruh motor dengan mematikan semua pin kendali
- digitalWrite(…, HIGH atau LOW); digunakan untuk mengatur arah putaran motor melalui motor driver
Hasil Percobaan
Setelah program diunggah dan rangkaian terhubung dengan benar, sistem akan berjalan sesuai urutan yang telah ditentukan. Pada tahap pertama, seluruh motor akan bergerak maju secara bersamaan. Pergerakan ini menunjukkan bahwa Arduino berhasil mengirimkan sinyal kendali yang tepat ke kedua motor driver, termasuk penyesuaian arah motor yang memiliki orientasi terbalik.
Gambar 2. Hasil Percobaan Menggerakan Motor
Setelah beberapa detik, semua motor akan berhenti sejenak. Kondisi ini menandakan bahwa perintah penghentian motor bekerja dengan baik dan sistem berada dalam keadaan aman. Selanjutnya, motor akan bergerak mundur dengan arah putaran yang berlawanan, tanpa perlu mengubah sambungan kabel.
Siklus maju, berhenti, dan mundur akan terus berulang selama Arduino mendapatkan catu daya. Percobaan ini membuktikan bahwa Arduino Uno mampu mengendalikan beberapa motor DC secara bersamaan dengan stabil dan menjadi dasar yang kuat untuk pengembangan robot bergerak yang lebih kompleks.
Tutorial Mengendalikan Motor DC Menggunakan Arduino Uno dan Motor Driver MX1508

LDR (Light Dependent Resistor) adalah sensor cahaya yang berbasis nilai resistansi. Semakin banyak intensitas cahaya yang diterima maka semakin... selengkapnya
Setelah sebelumnya kamu belajar menyalakan LED, sekarang saatnya Arduino mulai menerima perintah langsung dari kamu. Salah satu cara paling sederhana... selengkapnya

Motor servo adalah salah satu jenis motor listrik yang memiliki feedback berupa sensor posisi. Dengan adanya feedback tersebut, motor... selengkapnya
Semangat pagi, kali ini kita akan belajar untuk mengontrol LED melalui wifi menggunakan NodeMCU. Mengapa LED? nggak langsung ke... selengkapnya
Blynk menawarkan beragam fungsi ya, salah satunya untuk mengontrol perangkat. Penggunaan Blynk ini bisa kapan dan dimana saja ya,... selengkapnya

Sensor ultrasonik merupakan sensor yang dapat mendeteksi suatu benda yang ada di depannya dengan jarak tertentu. Prinsip kerja dari... selengkapnya

Apa itu efek autumn? Efek autumn adalah efek musim gugur, dimana dedaunan akan berubah warna dari hijau menjadi coklat... selengkapnya
Limit switch merupakan sebuah saklar yang memiliki tuas sebagai penghubung ataupun pemutus arus litrik. Prinsip kerjanya sama seperti push... selengkapnya
Keypad 4×4 berfungsi sebagai penghubung antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah Human Machine Interface (HMI). Papan... selengkapnya
Thingsboard merupakan sebuah platform IoT open-source yang memungkinkan anda untuk mengontrol ataupun memonitoring berbagai perangkat. Penggunaanya mudah, gratis dan... selengkapnya

Item Deskripsi : This module performance is stable, measure the distance accurately. performance nearly the same as SRF05, SRF02 SRF05,… selengkapnya
Rp 13.900
1 X LDR Sensor 5mm Cahaya 5528 Light Dependent Resistor LDR
Rp 4.000
The power supply is isolated industrial power modules, with a temperature protection, overcurrent and short circuit full protection, high and… selengkapnya
Rp 15.900
Putaran = 180º Specifications • Weight: 55 g • Dimension: 40.7 x 19.7 x 42.9 mm approx. • Stall torque:… selengkapnya
Rp 36.400
Ini yang Seri SN – DS3231 I2C RTC Module khusus DS3231SN – Include Baterai – Module jam digital – Keperluan… selengkapnya
Rp 34.900
Case patern: Solid Warna : Merah dan Hijau Current: 10-20 mA Diameter: 3mm
Rp 300
Spesifikasi: 50mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 75.000
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750
Kabel Jumper Dupont Pelangi 30cm Male to Female 1 lembar = 40 kabel
Rp 13.500
Kabel jumper Dupont untuk jumper Arduino atau Raspeberry Pi 20 cm Female to female 1 lembar = 40 kabel
Rp 11.300
Saat ini belum tersedia komentar.