
● online
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to M....
- Kabel Jumper 10cm Dupont Pelangi 10 cm Male to Mal....
- Jasa Cetak PCB....
- Sensor Api Flame detector sensor....
- IIC I2C LCD 1602 16x2 2004 20x4 Backpack for LCD A....
- Relay Module 1 Channel Modul Relay 5V 10A 1 Channe....
- Water Level sensor ketinggian air - deteksi air....
- Motor Servo MG995 TowerPro Metal Gear....
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Tutorial Mengitung Jarak dengan Pulsa Rotasi Disk Encorder dan Sensor Optocoupler ITR 9608
Optocoupler atau photo interrupter merupakan sensor optik slot tipe U yang menggunakan cahaya infra merah (IR) untuk mendeteksi ada atau tidaknya objek yang menghalangi jalur cahaya. Sensor ini memiliki dua bagian utama, yaitu:
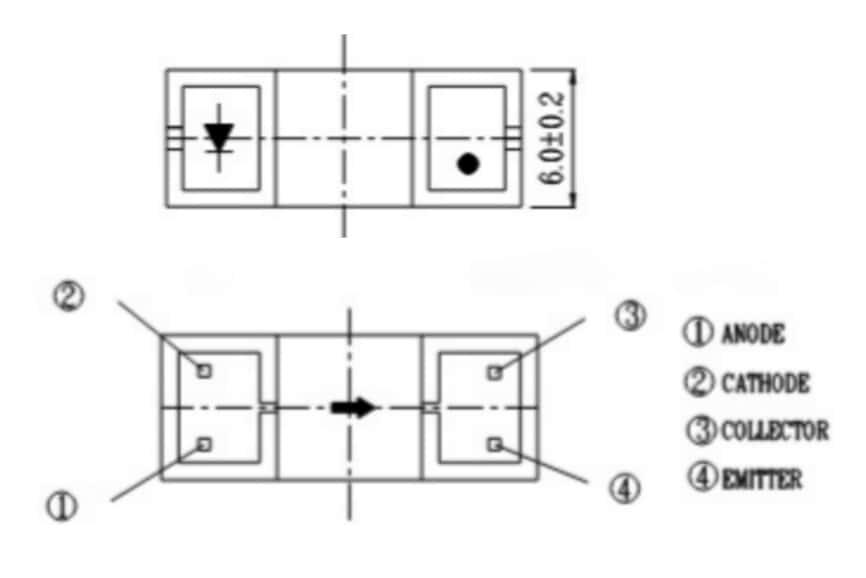
Gambar 1. Schematic Komponen Optocoupler
-
Pemancar
Bagian ini berupa LED infra merah yang berfungsi memancarkan sinar infra merah secara terus-menerus ke arah detektor. Cahaya ini tidak terlihat oleh mata manusia, tetapi dapat dideteksi oleh komponen Photodetector di sisi seberangnya. -
Penerima
Bagian penerima terdiri dari Phototransistor yang peka terhadap cahaya infra merah dari LED pemancar.
Ketika cahaya infra merah mengenai Phototransistor, maka transistor akan aktif dan menghasilkan sinyal pada output.
Sebaliknya, ketika sinar terhalang oleh objek seperti bagian gelap dari disk encoder, maka transistor akan nonaktif, dan output akan berubah ke kondisi logika berlawanan.
Kedua bagian ini dipasang berhadapan di dalam bentuk celah huruf “U”, sehingga sebuah benda seperti disk encoder bisa bergerak di antara keduanya dan memutus atau menghubungkan jalur cahaya infra merah. Dalam tutorial ini, kita akan membuat sistem sederhana yang menghitung jarak berdasarkan pulsa dari rotasi disk encoder, di mana 1 pulsa mewakili 1 mm pergerakan. Sistem ini sangat cocok untuk robot, mesin penghitung panjang kabel, konveyor, dan aplikasi otomasi lainnya.
Alat dan Bahan yang Diperlukan
Untuk menjalankan proyek ini, berikut yang kamu butuhkan :
- Optocoupler ITR960
- Arduino nano
- Push button
- LED
- Resistor
- Breadboard dan kabel jumper
Wiring Rangkaian Optocoupler
Susun rangkaian dengan panduan seperti ini:
- Pin 5v ke positif Breadboard
- Pin GND ke negatif Breadboard
- Pin D2 ke emitter optocoupler
- Pin D3 ke positif button
- Pin D4 ke positif LED 2 melalui resistor
- Kaki anoda optocouplerke 5v melalui resistor
- Kaki katoda optocouplerke GND
- Kaki collector optocouplerke GND
- Kaki emitter optocouplerke 5v melalui resistor
- Kaki katoda LED 1 ke resistor emitter optocoupler
- Kaki anoda LED 2 ke 5v
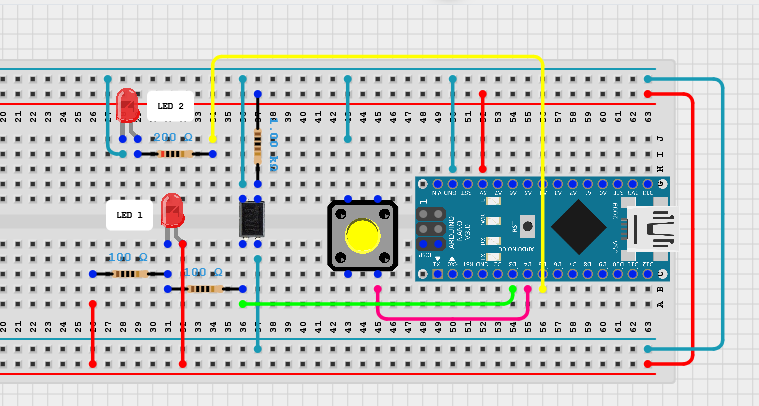
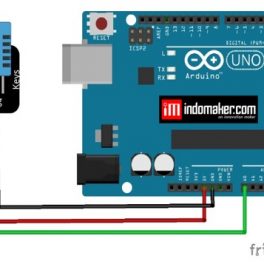
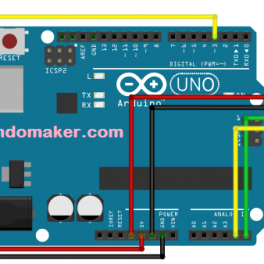
Gambar 2. Wiring Rangkaian Optocoupler dengan Arduino Nano
Menulis Program Data Optocoupler
Setelah semua komponen terpasang, buka software Arduino IDE dan tulis kode berikut :
/*
Penghitung Jarak berbasis Encoder
Versi: Arduino Nano
Encoder: 1 slot = 1 mm
*/
const byte sensorPin = 2; // Pin interrupt dari sensor encoder
const byte resetButtonPin = 3; // Tombol reset
const byte ledPin = 4; // LED indikator
// Spesifikasi encoder
const unsigned int slotsPerRevolution = 88; // jumlah slot per putaran
// Masukkan perkiraan RPM maksimum alatmu di sini
const unsigned int maxRPM = 600; // ubah sesuai kebutuhan (contoh: 600, 3000, dst)
volatile unsigned long pulseCount = 0;
volatile unsigned long lastPulseTime = 0; // untuk debounce di ISR
unsigned long debounceMicros = 500; // dihitung otomatis di setup()
const unsigned long minDebounceMicros = 50; // batas bawah praktis (μs)
// ISR (Interrupt Service Routine) — menghitung pulsa dari encoder
void handleSensorPulse() {
unsigned long now = micros();
if (now - lastPulseTime > debounceMicros) {
pulseCount++;
lastPulseTime = now;
}
}
void setup() {
Serial.begin(115200);
Serial.println("=== Encoder Distance Counter (Arduino Nano) ===");
pinMode(sensorPin, INPUT_PULLUP);
pinMode(resetButtonPin, INPUT_PULLUP);
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, LOW);
// Hitung debounceMicros berdasarkan maxRPM & slots
float pulsesPerSec = ((float)maxRPM / 60.0) * (float)slotsPerRevolution;
if (pulsesPerSec <= 0.0001) pulsesPerSec = 1.0; // safety
float tMin_us = 1000000.0 / pulsesPerSec; // mikrodetik antar pulsa
unsigned long computed = (unsigned long)(tMin_us * 0.35f); // 35% dari interval
if (computed < minDebounceMicros) computed = minDebounceMicros;
debounceMicros = computed;
// Info ke Serial
Serial.print("Slots per Revolution: ");
Serial.println(slotsPerRevolution);
Serial.print("Max RPM: ");
Serial.println(maxRPM);
Serial.print("Estimated min interval (us): ");
Serial.println((unsigned long)tMin_us);
Serial.print("Debounce interval (us): ");
Serial.println(debounceMicros);
if (tMin_us * 0.35f < minDebounceMicros) {
Serial.println("⚠️ WARNING: maxRPM terlalu tinggi, bisa kehilangan pulsa!");
}
// Gunakan interrupt 0 (pin D2 di Nano)
attachInterrupt(digitalPinToInterrupt(sensorPin), handleSensorPulse, RISING);
Serial.println(">> Encoder siap: 1 slot = 1 mm\n");
}
void loop() {
// Tombol reset ditekan (aktif LOW)
if (digitalRead(resetButtonPin) == LOW) {
noInterrupts();
pulseCount = 0;
interrupts();
digitalWrite(ledPin, HIGH);
Serial.println(">> Penghitung di-reset ke 0 mm");
delay(300); // debounce tombol
digitalWrite(ledPin, LOW);
}
// Ambil data dari variabel volatile
noInterrupts();
unsigned long pulseCopy = pulseCount;
interrupts();
// Hitung jarak (1 pulsa = 1 mm)
unsigned long jarakMM = pulseCopy;
Serial.print("Jarak Terdeteksi: ");
Serial.print(jarakMM);
Serial.println(" mm");
delay(100); // Update tiap 100 ms
}
Penjelasan Kode
slotsPerRevolution: jumlah lubang pada disk encoder.maxRPM: kecepatan maksimum perkiraan putaran disk (digunakan untuk menentukan waktu antar pulsa).pulseCount: jumlah total pulsa (setiap 1 pulsa = 1 mm).lastPulseTime: waktu mikrodetik dari pulsa terakhir untuk menghitung jeda antar pulsa (debounce).
Apa yang Akan Terjadi dengan Optocoupler?
Ketika disk encorder diputar secara perlahan maka sensor akan mendeteksi tiap pulsa nya sebagaia 1mm yang akan ditampilkan pada serial monitor secara berurutan tanpa adanya lonjakan yang tidak wajar, hal ini menunjukkan bahwa mekanisme debounce waktu mikrodetik (micros) pada ISR bekerja efektif untuk menyaring pulsa ganda akibat noise optik dari sensor. Saat tombol reset ditekan, LED indikator menyala sesaat dan penghitung kembali ke nol.
Tutorial Mengitung Jarak dengan Pulsa Rotasi Disk Encorder dan Sensor Optocoupler ITR 9608
Selain LED dan tombol, Arduino juga bisa digunakan untuk menghasilkan bunyi menggunakan komponen yang disebut buzzer. Buzzer sering dipakai sebagai... selengkapnya
Selamat datang di indomaker.com, pada pembahasan kali ini admin akan mengupas tentang penggunaan ESP32-CAM. Module ini merupakan sebuah module... selengkapnya
Dalam dunia fotografi, mengambil foto yang bagus merupakan suatu keahlian yang harus di kuasai oleh seorang fotografer. Karena dengan... selengkapnya
Sensor PIR (Passive Infrared) berfungsi sebagai pendeteksi gerakan berbasis suhu tubuh, khususnya radiasi inframerah yang dipancarkan oleh manusia dan hewan... selengkapnya

Android Intent adalah struktur data atau objek yang terdapat deskripsi dari tugas yang akan dijalankan. Salah satu keunggulan dari... selengkapnya
DHT11 adalah perangkat elektronik yang digunakan untuk mendeteksi kelembapan dan suhu udara. Sensor ini dapat digunakan untuk mendeteksi suhu... selengkapnya
MPU6050 merupakan sebuah sensor yang berfungsi untuk mengukur percepatan suatu benda yang bergerak. Nah kali ini kita akan belajar... selengkapnya
Penggunaan LCD I2C sering kali gagal menampilkan teks karena deklarasi awal yaitu alamat I2C yang salah/keliru dikarenakan alamat yang... selengkapnya
Oke Hallo semua pada kesempatan kali ini kita akan belajar mendeteksi kemiringan suatu benda. Sensor yang digunakan adalah tilt... selengkapnya

Sensor getar Piezoelektrik adalah komponen yang fantastis untuk mendeteksi benturan, getaran, atau bahkan suara. Namun berbeda dengan modul piezo 3... selengkapnya

Kabel Jumper Dupont Pelangi 10 cm.. male to female 1 lembar isi 40 kabel
Rp 9.000
2000W SCR Electronic Voltage Regulator Speed Controller Dimmer Thermostat Aplikasi : Kontrol temperature heater, kontrol kecepatan fan/bor tangan/gurinda tangan, kompor… selengkapnya
Rp 19.500
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750
Features and Specs: Dual-Core, 32-bit ARM Cortex M0+ Processor Clocked at 48MHz (default), configurable max to 133MHz. Ready with USB… selengkapnya
Rp 82.900
Modul sensor tegangan AC bolak balik 3 fasa ini menggunakan optocoupler sehingga tegangan input (AC) tidak akan mengganggu/membahayakan tegangan output… selengkapnya
Rp 57.000
Item Deskripsi : This module performance is stable, measure the distance accurately. performance nearly the same as SRF05, SRF02 SRF05,… selengkapnya
Rp 13.900
Spesifikasi: 20mm Kapton Tape Polymide Film Gold High Temp isolasi Tahan Panas Harga Tertera: 1 Roll Kapton Tape Polymide Film… selengkapnya
Rp 219.000
Kabel Jumper Dupont Pelangi 30cm female to Female 1 lembar = 40 kabel
Rp 13.500
Bagaimana jika mikrokontroler yang anda gunakan tidak memiliki port ADC. atau anda masih kurang dengan spesifikasi resolusi ADC yang disediakan… selengkapnya
Rp 65.000
Features – Calibrated directly in Celsius (Centigrade) – Linear + 10.0 mV/C scale factor – 0.5C accuracy guaranteeable (at +25C)… selengkapnya
Rp 8.000
Saat ini belum tersedia komentar.