
● online
- B0505S-1W 5V to 5V converter DC DC power module co
- Relay Module 1 Channel Modul Relay 5V 10A 1 Channe
- Kabel Jumper 10cm Dupont Pelangi 10 cm Female to F
- Kabel Jumper Arduino Dupont 20 cm Female to Male P
- Kabel Jumper arduino Dupont Pelangi 30 cm Male to
- RC Servo ARM Horn M3 Metal 25T MG995 MG946R MG996R
- Motor servo MG996R TowerPro Metal Gear
- ESR Meter Digital LCR-T4 Tester Transistor Diode M
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
- Selamat Datang di Indomaker ❯ Silahkan pesan produk sesuai kebutuhan anda, kami siap melayani.
Menangani 8×8 LED Dot Matrix Arduino
8×8 LED dot matrix merupakan sebuah display yang terdiri dari kumpulan led yang disusun secara simetris sejumlah 8 baris dan 8 kolom. Display nya bisa menampilkan berbagai karakter seperti huruf, angka maupun gambar. Untuk kegunaannya sering dipakai sebagai papan informasi berupa running text atau pun yang lainnya. Di bawah ini merupakan konfigurasi dari 8×8 dot matrix ini.

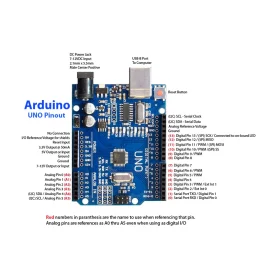
Sama seperti 7 segment dot matrix ini juga mempunyai jenis yaitu anoda dan katoda. Secara tampilan tidak ada bedanya, namun kita bisa mengenalinya dengan kode/seri yang terdapat di 8×8 dot matrix itu sendiri. Untuk katoda biasa ditandai dengan akhiran Ax, misalnya 2728AS. Sementara untuk anoda ditandai dengan akhiran Bx misalnya 3930BS. Cukup mudah kan? agar dapat digunakan sesuai keinginan, kita membutuhkan sebuah kontroler yang tak asing lagi adalah Arduino.
Alat dan bahan
Rangkaian

Sketch Program
#define ROW_1 2
#define ROW_2 3
#define ROW_3 4
#define ROW_4 5
#define ROW_5 6
#define ROW_6 7
#define ROW_7 8
#define ROW_8 9
#define COL_1 10
#define COL_2 11
#define COL_3 12
#define COL_4 13
#define COL_5 A0
#define COL_6 A1
#define COL_7 A2
#define COL_8 A3
const byte rows[] = {
ROW_1, ROW_2, ROW_3, ROW_4, ROW_5, ROW_6, ROW_7, ROW_8
};
const byte col[] = {
COL_1,COL_2, COL_3, COL_4, COL_5, COL_6, COL_7, COL_8
};
// The display buffer
// It's prefilled with a smiling face (1 = ON, 0 = OFF)
byte ALL[] = {B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111};
byte EX[] = {B00000000,B00010000,B00010000,B00010000,B00010000,B00000000,B00010000,B00000000};
byte A[] = { B00000000,B00111100,B01100110,B01100110,B01111110,B01100110,B01100110,B01100110};
byte B[] = {B01111000,B01001000,B01001000,B01110000,B01001000,B01000100,B01000100,B01111100};
byte C[] = {B00000000,B00011110,B00100000,B01000000,B01000000,B01000000,B00100000,B00011110};
byte D[] = {B00000000,B00111000,B00100100,B00100010,B00100010,B00100100,B00111000,B00000000};
byte E[] = {B00000000,B00111100,B00100000,B00111000,B00100000,B00100000,B00111100,B00000000};
byte F[] = {B00000000,B00111100,B00100000,B00111000,B00100000,B00100000,B00100000,B00000000};
byte G[] = {B00000000,B00111110,B00100000,B00100000,B00101110,B00100010,B00111110,B00000000};
byte H[] = {B00000000,B00100100,B00100100,B00111100,B00100100,B00100100,B00100100,B00000000};
byte I[] = {B00000000,B00111000,B00010000,B00010000,B00010000,B00010000,B00111000,B00000000};
byte J[] = {B00000000,B00011100,B00001000,B00001000,B00001000,B00101000,B00111000,B00000000};
byte K[] = {B00000000,B00100100,B00101000,B00110000,B00101000,B00100100,B00100100,B00000000};
byte L[] = {B00000000,B00100000,B00100000,B00100000,B00100000,B00100000,B00111100,B00000000};
byte M[] = {B00000000,B00000000,B01000100,B10101010,B10010010,B10000010,B10000010,B00000000};
byte N[] = {B00000000,B00100010,B00110010,B00101010,B00100110,B00100010,B00000000,B00000000};
byte O[] = {B00000000,B00111100,B01000010,B01000010,B01000010,B01000010,B00111100,B00000000};
byte P[] = {B00000000,B00111000,B00100100,B00100100,B00111000,B00100000,B00100000,B00000000};
byte Q[] = {B00000000,B00111100,B01000010,B01000010,B01000010,B01000110,B00111110,B00000001};
byte R[] = {B00000000,B00111000,B00100100,B00100100,B00111000,B00100100,B00100100,B00000000};
byte S[] = {B00000000,B00111100,B00100000,B00111100,B00000100,B00000100,B00111100,B00000000};
byte T[] = {B00000000,B01111100,B00010000,B00010000,B00010000,B00010000,B00010000,B00000000};
byte U[] = {B00000000,B01000010,B01000010,B01000010,B01000010,B00100100,B00011000,B00000000};
byte V[] = {B00000000,B00100010,B00100010,B00100010,B00010100,B00010100,B00001000,B00000000};
byte W[] = {B00000000,B10000010,B10010010,B01010100,B01010100,B00101000,B00000000,B00000000};
byte X[] = {B00000000,B01000010,B00100100,B00011000,B00011000,B00100100,B01000010,B00000000};
byte Y[] = {B00000000,B01000100,B00101000,B00010000,B00010000,B00010000,B00010000,B00000000};
byte Z[] = {B00000000,B00111100,B00000100,B00001000,B00010000,B00100000,B00111100,B00000000};
float timeCount = 0;
void setup()
{
// Open serial port
Serial.begin(9600);
// Set all used pins to OUTPUT
// This is very important! If the pins are set to input
// the display will be very dim.
for (byte i = 2; i <= 13; i++)
pinMode(i, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(A3, OUTPUT);
}
void loop() {
// This could be rewritten to not use a delay, which would make it appear brighter
delay(5);
timeCount += 1;
if(timeCount < 20)
{
drawScreen(A);
}
else if (timeCount < 40)
{
drawScreen(R);
}
else if (timeCount < 60)
{
drawScreen(D);
}
else if (timeCount < 80)
{
drawScreen(U);
}
else if (timeCount < 100)
{
drawScreen(I);
}
else if (timeCount < 120)
{
drawScreen(N);
}
else if (timeCount < 140) {
drawScreen(O);
}
else if (timeCount < 160)
{
drawScreen(ALL);
}
else if (timeCount < 180)
{
drawScreen(ALL);
}
else {
// back to the start
timeCount = 0;
}
}
void drawScreen(byte buffer2[])
{
// Turn on each row in series
for (byte i = 0; i < 8; i++) // count next row
{
digitalWrite(rows[i], HIGH); //initiate whole row
for (byte a = 0; a < 8; a++) // count next row
{
// if You set (~buffer2[i] >> a) then You will have positive
digitalWrite(col[a], (buffer2[i] >> a) & 0x01); // initiate whole column
delayMicroseconds(100); // uncoment deley for diferent speed of display
//delayMicroseconds(1000);
//delay(10);
//delay(100);
digitalWrite(col[a], 1); // reset whole column
}
digitalWrite(rows[i], LOW); // reset whole row
// otherwise last row will intersect with next row
}
}
//
/* this is siplest resemplation how for loop is working with each row.
digitalWrite(COL_1, (~b >> 0) & 0x01); // Get the 1st bit: 10000000
digitalWrite(COL_2, (~b >> 1) & 0x01); // Get the 2nd bit: 01000000
digitalWrite(COL_3, (~b >> 2) & 0x01); // Get the 3rd bit: 00100000
digitalWrite(COL_4, (~b >> 3) & 0x01); // Get the 4th bit: 00010000
digitalWrite(COL_5, (~b >> 4) & 0x01); // Get the 5th bit: 00001000
digitalWrite(COL_6, (~b >> 5) & 0x01); // Get the 6th bit: 00000100
digitalWrite(COL_7, (~b >> 6) & 0x01); // Get the 7th bit: 00000010
digitalWrite(COL_8, (~b >> 7) & 0x01); // Get the 8th bit: 00000001
}*/
Upload sketch program di atas, jika sudah yang nampil pada dot marix adalah icon love ;p. Semoga bermanfaat. terima kasih
Menangani 8×8 LED Dot Matrix Arduino

Arduino Pro Mini merupakan jenis Arduino yang berukuran kecil dibandingkan dengan Nano, Unodan Mega. Dengan ukuran yang kecil ini... selengkapnya
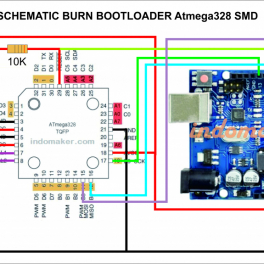
Dulu kita sudah belajar untuk mengisi bootloader Arduino Uno ke IC Atmega328 juga, namun dengan jenis DIP (LIHAT DISINI).... selengkapnya
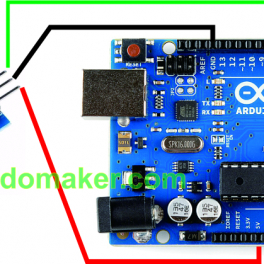
Traffic Light atau lampu lalu lintas adalah lampu yang mampu menertibkan arus lalu lintas jalanan baik kendaraan bermotor, mobil,... selengkapnya

Sensor INA219 merupakan sensor yang berfungsi untuk mengukur 2 parameter sekaligus yaitu tegangan (volt) dan arus (ampere). Tegangan yang... selengkapnya

I2C merupakan sebuah modul komunikasi serial dua arah yang berfungsi untuk mengirim dan menerima data. Keduanya adalah SCL (Serial... selengkapnya
Limit switch merupakan sebuah saklar yang memiliki tuas sebagai penghubung ataupun pemutus arus litrik. Prinsip kerjanya sama seperti push... selengkapnya
Oke pada artikel kali ini membahas telegram kembali menggunakan sensor DHT untuk mendeteksi suhu dan kelembaban. Jadi nanti akan... selengkapnya
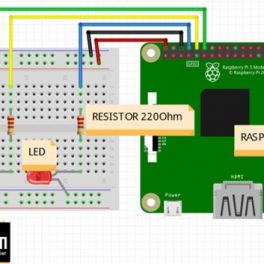
Secara bawaan, GPIO Raspberry Pi hanya bisa membaca input digital yang berarti hanya bisa mendeteksi dua kondisi, yaitu hidup atau... selengkapnya
Oke kali ini akan membahas seputar sensor fingerprint, dimana fungsi dari fingerprint ini adalah sebagai validasi data identitas dengan... selengkapnya
Setelah kamu mengenal Arduino Uno dan isi dari Arduino Uno Trainer Kit, sekarang saatnya masuk ke bagian yang lebih teknis... selengkapnya

Dual Volt Amp Meter Digital Ampere Meter Voltmeter 10A 0-100V Ammeter Dilengkapi dengan pengukuran Voltmeter dan Amperemeter dalam 1 display… selengkapnya
Rp 26.500
Specifications: Operating voltage: DC3-5V Operating current: less than 20mA Sensor Type: Analog Detection Area: 40mmx16mm Production process: FR4 double-sided HASL… selengkapnya
Rp 3.000
Buruan dibeli gan….barang murah-berkualitas SIAPA CEPAT DIA DAPAT Spesifikasi: LCD 1602 / 16×2 (16 karakter, 2 baris) merek QAPASS (cek… selengkapnya
Rp 24.500
Kabel jumper Dupont untuk jumper Arduino atau Raspeberry Pi 20 cm Female to female 1 lembar = 40 kabel
Rp 11.300
This is a set of transmitter and receiver in one of the photoelectric sensor. Detection distance can be adjusted according… selengkapnya
Rp 37.500
Support terus UKM indonesia dengan membeli produk-produk dalam negeri. Untuk kualitas tidak usah diragukan, udah kita tes QC dengan sangat… selengkapnya
Rp 8.500
Dimmer AC 220 Volt 4000 Watt + Casing Aluminium Potensiometer untuk mengatur tegangan output min/max pada tegangan AC PLN 220V…. selengkapnya
Rp 52.500
Menerima jasa cetak PCB FR2 (pertinax) / FR4 (double) single / double layer. Silahkan ke web kalkulator biaya cetak pcb… selengkapnya
Rp 1.000
12A 300W DC Buck Step Down Converter CC CV Driver LED charge Battery Spesifikasi: Input Voltage: 5-40V Output Voltage: 1.2-35V… selengkapnya
Rp 39.400
Warna : biru dan merah Bahan Alumunium 25T include baut 2 pcs
Rp 8.750
Saat ini belum tersedia komentar.